by Frank Block and Andreas Dewald
Abstract
The analysis of memory during a forensic investigation is often an important step to reconstruct events. While prior work in this field has mostly concentrated on information residing in the kernel space (process lists, network connections, and so on) and in particular on the Microsoft Windows operating system, this work focuses on Linux user space processes as they might also contain valuable information for an investigation. Because a lot of process data is located in the heap, this work in the first place concentrates on the analysis of Glibc’s heap implementation and on how and where heap related information is stored in the virtual memory of Linux processes that use the Glibc heap implementation. Up to now, the heap was mostly considered a large cohesive memory region from a memory forensics perspective, making it rather hard manual work to identify relevant information inside. We introduce a Python class for the memory analysis framework Rekall that is based on our analysis results and allows access to all chunks contained in the heap and their meta information. Further, based on this class, six plugins have been developed that support an investigator in analyzing user space processes: Four of these plugins provide generic analysis capabilities such as finding information/references within chunks and dumping chunks into separate files for further investigation. These plugins have been used to reverse engineer data structures within the heap for user space processes, while illustrating how such plugins ease the whole analysis process. The remaining two plugins are a result of these user space process analyses and are extracting the command history for the zsh shell and password entry information for the password manager KeePassX.
This report is an extended version of our paper published at DFRWS USA (Block and Dewald, 2017). The full paper including appendices can be downloaded as a PDF.
I. Introduction
As the memory represents the current state of a running system, it contains for example information about browser history, entered commands, active network connections, loaded drivers as well as active processes and hence allows detailed insights into previous activities.(Ligh et al., 2014) While much of this information is located in the kernel space and can be examined with existing solutions for various operating systems such as Rekall (Google Inc, 2016c) and Volatility (Foundation, 2016), there is also a lot of information located in the user space that might be of interest in a forensic investigation, too. The heap of a user space process for example is typically a rich source of various kinds of data and, depending on the concrete application, might contain credentials, IP addresses/DNS names or a command history. However, this information is, at least in the context of Linux, not yet easily extractable. To efficiently and reliably identify and extract this information, the investigator requires a view of the heap that is the same or at least similar to the one the process has: Knowledge about where the data is located, what kind of data is stored at a specific position and which amount of memory a specific data portion occupies. Otherwise, the investigator can only work with the heap as one large memory region, with all pieces of information located inside without any known structure.
A. Motivation
In the context of Linux processes, the focus of user space analysis was in the past limited to searches for specific patterns within the complete process memory or the whole heap/stack. For example, in order to reconstruct the command history for the Linux bash shell, Rekall’s bash Google Inc (2016a) plugin searches the heap for a hashtag followed by a Unix timestamp in string format (e.g. #1471572423) (Ligh et al., 2014, 630 ff.). If however the information of interest is not marked in an easily detectable way, a simple pattern matching will fail.
When taking a scenario in which the investigator identifies a certain string in memory and tries to identify references to it, this search might fail even though there are (indirect) references. This could be the case if the string is part of a struct or object and is not located at the beginning, while the pointer of interest references the struct instead of the string directly (see Section V-B for an example). To be able to find those references, the beginning of that struct must be known, which requires knowledge about the size of its fields and the location of the string within that struct. However, these details are normally not available in a black box analysis.
B. Contributions
In this work, we make the following contributions:
- We analyzed the Glibc heap implementation and summarize the information that enables an investigator to perform a manual heap analysis or implement his or her own tool for this purpose. In particular, we explain how heap structures are arranged and where they are typically located in memory (Section II-D).
- We demonstrate that some chunks might hide somewhere in the memory, for which we propose an algorithm to retrieve them (Section III-F).
- These insights have been used to develop a Python class called HeapAnalysis, which can be used to implement specific heap analysis plugins.
- Based on this class, we developed plugins that support the investigator in analyzing the heap and its chunks.
- We explain how data of user space processes can be analyzed by applying these plugins to gather relevant information (similar to the analysis done by Cohen (2015) for a Windows user space process).
- A result from this analysis are two further plugins: The first one gathers all executed commands from the heap of a zsh shell (Version 5.2) process and the second extracts the title, username, URL and comment field of all retrievable password entries from the heap of the password manager KeePassX (version 0.4.3).
The HeapAnalysis class and all mentioned plugins support x86 and x64 architectures.
C. Outline
This work is structured as follows: Section II covers details about the heap of user space processes that use Glibc’s heap implementation. In Section III, we provide an overview of the developed heap analysis plugins, Section IV covers the evaluation of those plugins, Section V provides a detailed analysis of applications, and Section VI concludes this paper.
D. Related Work
Cohen (Cohen, 2015, p. 1138) states that “the analysis of user space applications has not received enough attention so far”. This not only underlines the motivation of this work, but also the reason for which there is not much literature about that specific topic. Existing literature in the field of Linux memory forensics mainly covers kernel related topics such as the work of Urrea (2006), Case et al. (2010) and Ligh et al. (2014).
The few exceptions are the work by Leppert (2012) and Macht (2013), who both focused on the Android operating system of mobile devices, which is Linux based, and analyzed applications and their heap data. However, their analysis concentrated primarily on serialized Java objects contained in the heap and not on the way heap objects are managed. Other exceptions are the already existing plugins cmdscan Google Inc (2016b) and bash Google Inc (2016a), which extract the command history from Windows’ cmd and Linux’s bash shell, respectively. These plugins, however, leverage the fact that in those cases it is possible to identify the information by only looking at the heap as one large memory region. Another related work is the analysis of Notepad’s heap (Ligh et al., 2014, p. 223). This is to the best of our knowledge the only example that uses any heap details and, as most of the prior work, is related to Windows too.
Outside the scope of forensics, there has been fundamental research on the heap and, in particular, on the heap of Linux processes and how it is managed. Especially the research by Ferguson (2007) serves a solid understanding about Glibc’s heap implementation. This previous research, however, focused more on the ways the heap can be exploited and hence does not provide enough information to reliably gather all relevant information from the heap in a memory forensics scenario.
The work of Cohen (2015) is the first to approach this research gap with a set of analysis tools for the Windows Operating system. While there are some similarities between Windows’ heap implementation and the one from Glibc (for example in both cases an allocated chunk is preceded by a struct containing at least the chunk’s size), they differ in the details.
II. Glibc Analysis
In this section, we present the results of our analysis of the Glibc heap implementation from a memory forensics perspective.
A. Different Heap Implementations
There are various heap implementations available, most of them used in the context of a certain operating system or application. The reasons that there are multiple implementations are amongst others an increase in functionality requirements over the last decades (e.g. support for multi-threading (Gloger, 2006)) and the pursuit for performance improvements (Ghemawat and Menage, 2015). The following list shows some of those implementations.
dlmalloc An early implementation, which was also the basis for ptmalloc2.
ptmalloc2 Improved implementation of dmalloc, which was used as a basis for Glibc.
Glibc malloc The implementation covered in this work.
jemalloc Mostly used in FreeBSD and Mozilla products.
tcmalloc Mainly used for Google’s browser (Chrome).
Low Fragmentation Heap Part of the heap implementation used for Windows Vista and later.
The reason why most of the heap implementations contain the word malloc in it, is because of the same named function. This function is the core of any of those implementations as it is responsible to allocate a given amount of bytes from the heap and to return it to the caller. The latter part is realized with a pointer to that memory space that the caller can use to access and store
data in it. Those implementations are hence sometimes also referred to as memory allocators.
One of the first implementations was dlmalloc by Doug Lea (Lea, 2006). As it does not support multithreading, it was improved by Wolfram Gloger with ptmalloc2 (Gloger, 2006). ptmalloc2 is used in many Linux/Unix distributions but may also be used in applications compiled under mingw or cygwin. (Cohen, 2015, page 1139)
As the usage of a certain heap implementation is not bound to a specific operating system, a user space process can easily choose to use a different one (Cohen, 2015, page 1139). This might either be realized by using one, offered by the operating system, or by already including such an implementation within the application (e.g. the case with Mozilla products such as Firefox). Such processes might then however not be analyzable using the information or tools introduced in this work.
Microsoft uses yet another implementation which has already been analyzed by Valasek (2010). Their design consists of a back-end and front-end allocator. The back-end allocator mainly initializes the heap and provides large memory regions while the front-end allocator is responsible for splitting those large regions in smaller ones and managing them. The front-end allocator implementation, used in Windows Vista and later, is called Low Fragmentation Heap and is only used if the implementation decides it is necessary. Otherwise, only the back-end allocator will serve the application with memory.
The implementation examined in this work is Glibc version 2.23 (Free Software Foundation Inc., 2016), which is based on Wolfram Gloger’s ptmalloc2 (Gloger, 2006). As written in a comment of the Glibc source code, their implementation of malloc and further functions have been substantially changed and do not share many similarities anymore (see line 22 in Listing 34). The following Section II-B will give a high level overview of the most important objects and structs used in Glibc’s heap implementation.
B. Glibc Heap Overview
This section provides a high level overview of the most important objects and structs used in Glibc’s heap implementation. Figure 1 shows a potential heap layout of a running process, with a focus on references between the various elements. Starting from the lowest and most important level, a chunk contains the actual user/process data, which has been allocated e.g. explicitly via a malloc call or implicitly via a new call in the context of class instantiation. Those chunks are located in a certain memory region.
Given for example the first part of a C program shown in Listing 1 which uses the Glibc, chunk_pointer represents a pointer to a chunk somewhere in one of these memory regions or more precisely in one of the Allocated Chunks areas and the memset call fills the chunk’s complete available space with the character A.
This means that the memset call results in a long list of A characters residing somewhere in an area marked as Allocated Chunks and which belong to a certain chunk. (It should be noted that there are normally no fixed areas in which allocated or freed chunks are located, but this example has been chosen for the sake of an easy introduction.)
Besides allocated chunks that represent in essence chunks currently in use, there are also Freed Chunks that represent chunks which were in use but no longer are. The transition from allocated to freed is normally done via the free function call. When a chunk gets freed, the chunk itself, or at least its data, stays in most scenarios at the same location as before, and its data is (beside some modifications which are explained later on) not deleted or overwritten. When however a new chunk is requested, whose size fits in the freed chunk, this freed chunk might get used for the new chunk and hence, the old information is overwritten.
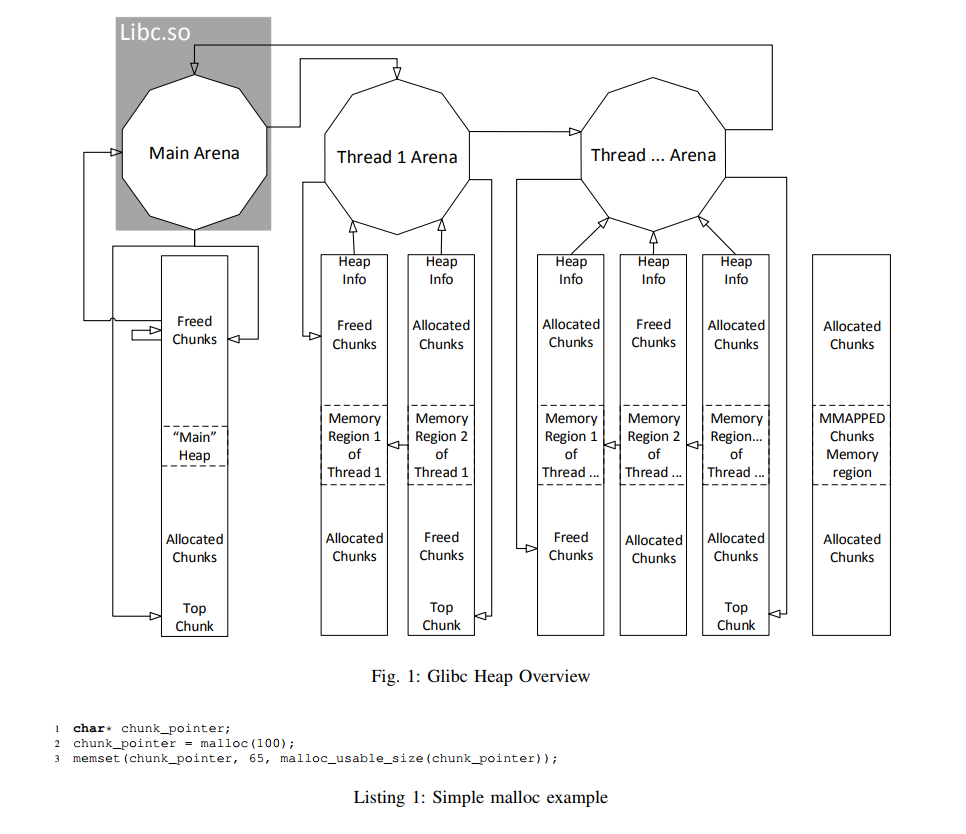
At the highest level are arenas, which represent in essence heap space belonging to one or multiple threads while each arena has its own memory regions containing allocated and freed chunks from the associated thread(s). While an arena does not have a direct link to each memory region or to allocated chunks (see Figure 1), there are other connections like pointers to freed chunks (will be covered in Section II-C1 on the facing page), the next arena and the top chunk. This special chunk represents the remaining free space for a given arena. If a new chunk is requested and no freed chunk is available that could serve the request, the new chunk is created from the necessary amount of space taken from the top chunk (see Section II-C5 for more details or Section II-E for special scenarios). Besides a connection to some chunks, each arena contains also a pointer to the next arena while the last arena points to the first one located in the mapped Glibc library (see also Section II-D1).
One level beneath arenas are the heap_info structs. Despite their name they do not describe the whole heap of a process or the part of the heap associated with a thread but only a part of a mapped memory region (described by a vm_area_struct struct) they belong to. More specifically, each mapped memory region belonging to an arena (except for the main arena) contains, at least at the beginning of the memory region, one instance of the heap_info struct, which holds the size of the current heap part in that memory region. Besides the size, each heap info struct holds a pointer to the associated arena (malloc_state struct) and a pointer to the previous heap_info struct within the same arena. In that way, all of them are linked together.
Excluded from arenas and heap_info regions are MMAPPED chunks. As can be seen in Figure 1, there are no links from MMAPPED chunks to any other structures or from heap structures to them. Those chunks are normally created when an allocation request exceeds a given threshold (typically 128 ∗ 1024 bytes on x86 architectures). In that case, the chunk is not included in the main heap or any memory region belonging to another arena, but the operating system is asked for an exclusive memory region just for that chunk (via the mmap API call), in which the chunk is placed.
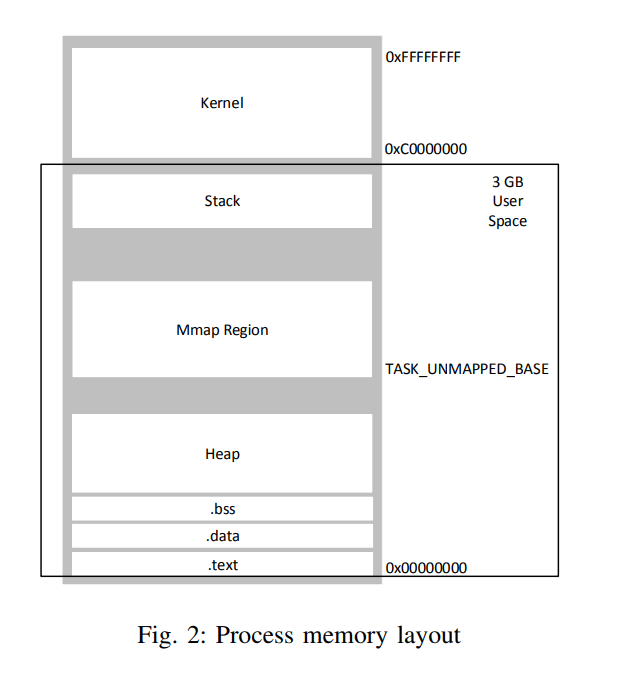
While memory space for the main heap is acquired using the brk system call, MMAPPED chunks and also ll thread arenas are using the mmap system call to acquire memory regions for their chunks. That means, the main heap is located in the area marked as Heap in Fig. 2 and MMAPPED chunks and the data from thread arenas, respectively, in the area marked as Mmap Region
in Fig. 2.
Chunks and all other mentioned objects are described and realized via structs. For each connection which is observable in Figure 1, there is an corresponding pointer in the relevant struct to the linked struct. Those structs and connections will be examined in more detail in the next section.
C. Glibc Heap Details
The following Sections will give a low level explanations of the objects, structs and concepts described in Section II-B on page 3. The information provided in this section is based on the work of Ferguson (2007), but takes a deeper look in each topic. Further details, especially in the context of memory layout, are covered in Section II-D on page 14.
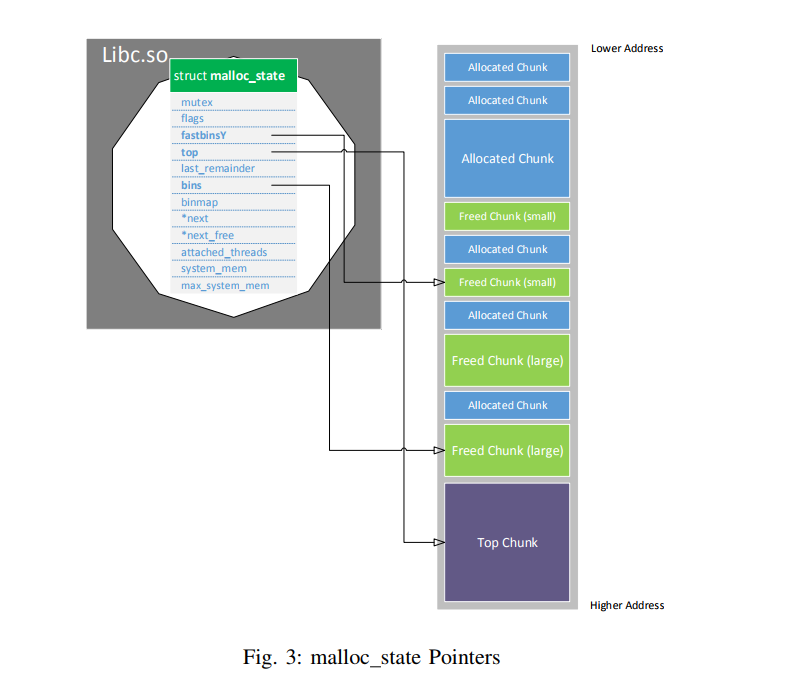
1) Arena and Heap Info structs: Arenas are realized via malloc_state structs. The struct itself and the already mentioned relations between the arena and chunks can be seen in more detail in the Fig. 3 on the next page. The malloc_state struct on the left side, contained in the mapped Glibc library, is called main arena as it is used by the first/main thread thread (see also NON_MAIN_ARENA flag mentioned in Section II-C2 on page 7). It holds, like all arenas, pointers to freed chunks but none to allocated chunks. The relevant members in this context are fastbinsY for fastbin chunks and bins for bin chunks. As can be seen however, the arena does not hold pointers to all freed chunks as they contain further links to subsequent freed chunks themselves. The bins and top chunk (pointed to by the top member) are explained in more detail in Section II-C4 on page 11.
Another relevant member of the malloc_state struct is system_mem. It holds the size of the whole arena, which means all memory regions containing any chunks belonging to that arena. In the case of the main arena, this does not include the bytes allocated by the malloc_state struct itself, in all other cases their size is included (see Section II-D1 on page 14 for further details). As the MMAPPED chunks are not part of any arena, their size and memory regions are hence not part of the system_mem value of any arena.
As described in Section II-B on page 3 and shown in Fig. 1, all arenas are linked together. This is on the one hand done via the next member, which realizes a circular linked list where each arena points to the next arena and the ”last” arena points to the first one (main arena contained in the mapped Glibc library), and on the other hand with the next_free member, pointing
to freed arenas (e.g. from dead threads).
The further fields of the malloc_state struct are not important in the context of this work and hence will be only shortly covered:
mutex This member is used during runtime to ensure exclusive access to the malloc_state struct during modification operations and hence prevents simultaneous access.
flags Holds flags e.g. indicating whether or not there are any fastbin chunks or any arena corruption has been detected during runtime.
last_remainder If a freed chunk is used for an allocation but is bigger than the requested size, the chunk is split and the remaining bytes form new chunk called the last_remainder. As this chunk is also pointed to by the unsorted bin (see Section II-C4 on page 11), this field adds no new information from a memory analysis perspective.
binmap This field holds the information which bins are empty and which do not. It is realized via 4 unsigned integers (= 128 bit), where each bit represents one bin (see also Section II-C4 on page 11). The purpose of this field are performance reasons, as traversing all bins one after the other in order to find freed chunks is more time consuming than just checking bits.
attached_threads This member was introduced in Glibc Version 2.23 and counts the number of threads that are using this arena. As there is normally a maximum number of arenas, new threads not always get their own arena but start to share them with other threads. In these cases, this counter is accordingly increased or decreased if a thread dies.
max_system_mem Is used in the context of the system_mem member, but serves no further valuable information for this work.
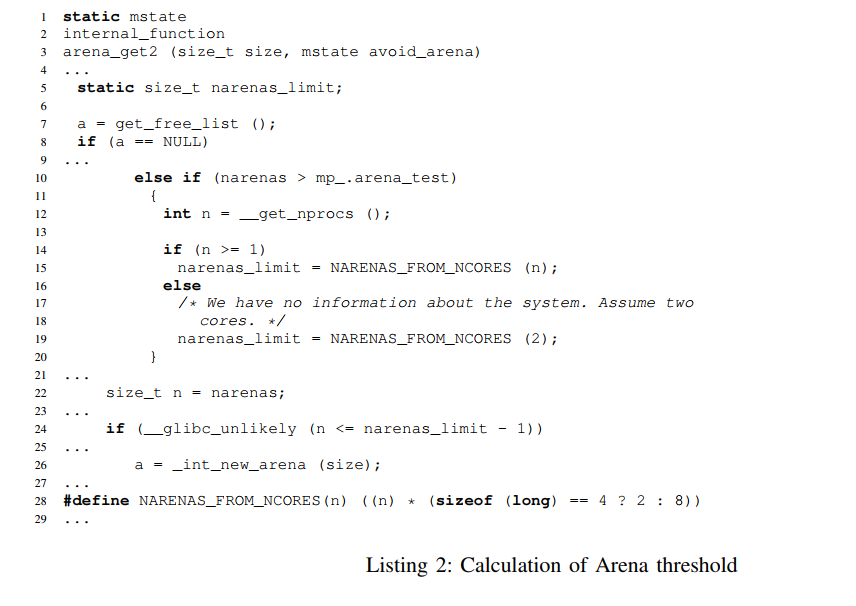
The number of arenas corresponds in principle with the number of threads. But their quantity is limited and the maximum possible amount of arenas depends on certain factors. Listing 2 illustrates the relevant code from the malloc.c source file, explaining those factors.
One important function in this case is get_arena2, which is responsible for deciding whether or not a new arena is created. The decision depends on the one hand on the existence of free arenas that can be used for the current request (line 7 and 8) and on the other hand on the amount of already existent arenas (lines beginning at 8). If there are free arenas, those are used to serve the current request for a new arena. If there are no free arenas and the current number of arenas does not exceed the value of narenas_limit (line 24), a new arena is created (line 26). The value of narenas_limit is calculated with the macro NARENAS_FROM_NCORES (line 28) and depends on the architecture and the number of cores (line 14). In the case of 32 bit systems the value of narenas_limit is the amount of cpu cores times two and for 64 bit architectures times eight.
There is however one exception, which results from the two if statements in lines 10 and 24. The value of mp_.arena_test is calculated with a static core number of 1. This means, the if statement in line 10 only returns true, if the current amount of arenas is already bigger than the result from NARENAS_FROM_NCORES (1) . Only in this case, narenas_limit is set to a value other than zero. As long as narenas_limit is zero, the if statement in line 24 evaluates to true or almost all numbers, as the operation 0 − 1 results in the largest possible number for that data type (assuming
an unsigned type). So for a system with one CPU core, narenas_limit is only set to a nonzero value if the number of arenas already exceeded the value of NARENAS_FROM_NCORES (1) and hence, the maximum number of arenas is 3 for 32 bit and 9 for 64 bit architectures. With more cores than one, NARENAS_FROM_NCORES dictates the maximum number.
There is however a third setting which could influence the maximum number of arenas. The function mallopt allows to change members of the malloc_par struct at runtime. This struct’s members are used to control certain global settings, more specifically this is done via the only instance of that struct, called mp_ and located in the mapped Glibc library. Amongst the members is also the field arena_max, which allows to set the maximum amount of arenas, independent of architecture or number of CPU cores.
While the arena describes the whole memory space related to a certain thread, the heap_info struct describes only a specific memory region, containing at least a subset of all chunks belonging to the associated arena. Fig. 4 shows the struct and its members.
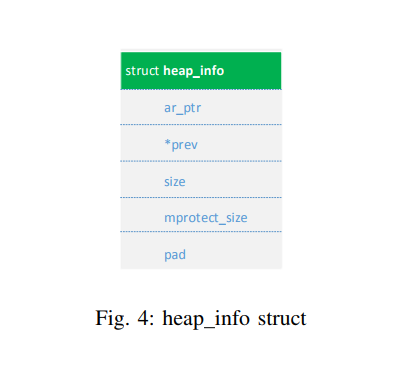
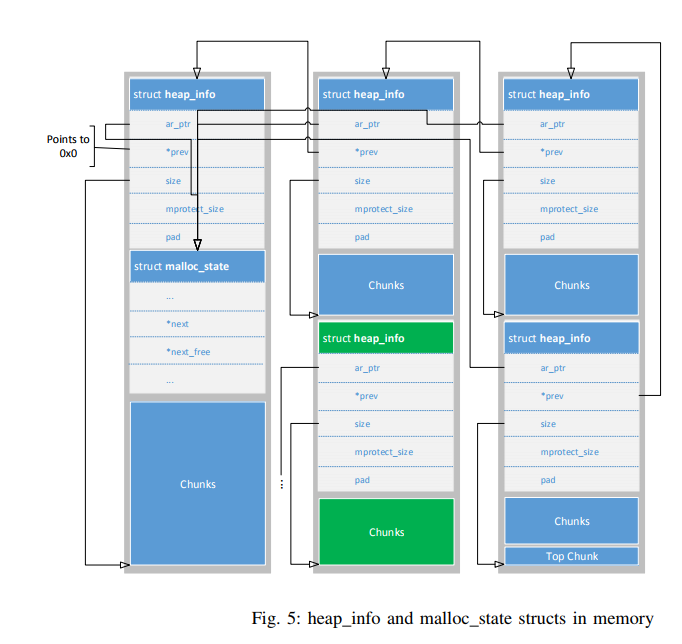
As can be seen in Fig. 1 on page 4 or in more detail in Fig. 5 on page 16, each heap_info instance has a pointer to the associated arena and to the previous heap_info instance that also belongs to that arena. The arena pointer is stored in the ar_ptr member and the reference to the previous heap_info in the prev member. In contrast to an arena’s next field however, the prev pointers do not realize a circular linked list. Instead, the prev field of the first heap_info is simply null.
Similar to an arena’s system_mem member, the heap_info struct contains a size field, which defines the amount of bytes that belong to this heap region. This size normally ranges from the beginning of the memory region described by the vm_area_struct struct until its end. The two left members are mprotect_size, which is only used in the context of shrinking or growing a heap,
and pad which simply ensures, that data following the heap_info struct is aligned.
2) Allocated Chunks: As explained in Section II-B on page 3, allocated chunks contain the user/process data and are located somewhere in a memory region. There are no pointers from any other heap related struct, referencing allocated chunks.
A chunk in general is described by the malloc_chunk struct which marks the beginning of each chunk and contains the following fields:
prev_size If the previous chunk is freed, it contains the previous chunk’s size.
size The distance from the beginning of the current chunk until the next chunk in bytes.
fd Forward link, pointing to the next freed chunk.
bk Backward link, pointing to the previous freed chunk.
fd_nextsize Points to the next chunk with a bigger size.
bk_nextsize Points to the next chunk with a smaller size.
This struct is located at the beginning of each chunk but not all fields are used for every chunk. In the case of allocated chunks, primarily the size field is used for its intended purpose. Only if the previous chunk is a freed chunk, is the prev_size field used. The relevant member for this sub section is the size field. All other members of the malloc_chunk struct are only relevant for freed
chunks and explained in more detail in Section II-C4 on page 11. The size field contains the distance from the beginning of the current chunk until the next chunk in bytes (see the appropriate subsections in Section II-D2 on page 15 for calculations regarding chunk size and data portions). As already explained by Ferguson (2007, section 0.2.1), this field not only contains size information but the lower 3 bits of the size are used as special flags, indicating whether or not
- the previous chunk is an allocated or fastbin chunk or a freed chunk belonging to a bin. If the previous chunk is freed (but not a fastbin chunk), the least significant bit (called PREV_INUSE) is set.
- this chunk is an MMAPPED chunk. If it is, the second least significant bit (called IS_MMAPPED) is set.
- this chunk belongs to the main arena. If not, the third least significant bit (called NON_MAIN_ARENA) is set.
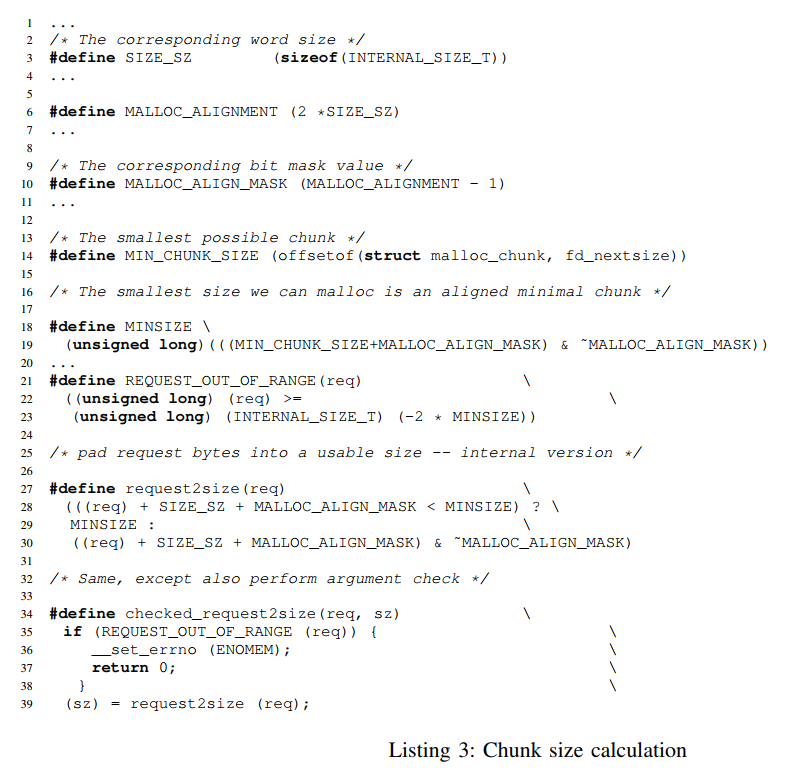
The reason that these three lower bits can be used as flags and are not required to specify the chunk’s size is a size alignment. This means, that the size cannot have arbitrary values but is typically a multiple of 8 for 32 bit and a multiple of 16 for 64 bit architectures. The relevant macros which are used to get an aligned size are request2size and checked_request2size (see Listing 3). As can be seen in the macro, it not only aligns the size in the sense of ensuring it is a multiple of 8 or 16, but also always returns a higher value than given (even if the given value is already aligned). The reason for this is that it already takes into account, that the chunk size includes also struct information and hence increases the user request by that size, in order to serve the user the requested space for its data (see Section II-D2 on page 15 for more details). For example, when requesting 16 byte of data on a 32 bit architecture, this value is already perfectly aligned, but request2size returns 24.
Regarding those bits, the following additional statements can be made:
- An MMAPPED chunk has always the IS_MMAPPED bit but never the NON_MAIN_ARENA or PREV_INUSE bit set (see also Section II-C3 on the facing page).
- A freed bin (not fastbin) chunk has neither the IS_MMAPPED nor NON_MAIN_ARENA bit set. It furthermore has normally always the PREV_INUSE bit set, as neighbored freed bin chunks are consolidated (see also Section II-C4 on page 11).
- A freed fastbin chunk residing in a thread arena keeps its NON_MAIN_ARENA bit, in contrast to a freed bin chunk (see Section II-C4 on page 11)_ A chunk following a freed bin chunk has no PREV_INUSE bit set, a chunk following a freed fastbin chunk however has this bit still set (see Section II-C4 on page 11).
- As stated in the comments of malloc.c regarding the PREV_INUSE bit, the “very first chunk allocated always has this bit set, preventing access to nonexistent (or non-owned) memory” (see lines 1187 and 1188 in Listing 35).
- The top chunk always has the PREV_INUSE bit set (see Section II-C5 on page 14).
The smallest size for a chunk is defined in malloc.c and mainly depends on the architecture. Listing 3 shows an excerpt of the relevant lines of code from that source file.
The macro MIN_CHUNK_SIZE holds in fact the minimal size a chunk could have. It is defined by taking the number of bytes from the beginning of the malloc_chunk struct until the fd_nextsize member (see Sectionsec:allocatedChunks). As prev_size and size are normally unsigned integers (4 byte on 32 bit and 8 byte on 64 bit architecture) and fd and bk are pointers, the minimal chunk size on a 32 bit architecture is typically 16 and for a 64 bit architecture 32 byte. However, to ensure alignment, it is recalculated and assigned to MINSIZE , which is the internal relevant variable and keeps the smallest size a chunk is allowed to have. On this scenario this recalculation does not change the calculated values, so it stays with 16 and 32 byte, respectively. It should be noted that these values represent the default behavior and may differ e.g. when INTERNAL_SIZE_T is changed at compile time.
Line 27 of Listing 3 shows the relevant macro which enforces the minimum chunk size. On a chunk allocation, function malloc uses the macro checked_request2size and hence implicitly macro request2size to get the final size used for the allocation. As can be seen in lines 28 and 29 of Listing 3, if the requested size is too small, the size to allocate is set to MINSIZE . This is e.g. the case when malloc is called with a size of zero.
Regarding the maximum chunk size, it would be theoretically possible to allocate a chunk with the size 2 32 on a 32 bit architecture as the size member is here normally a four byte integer. It is however restricted by the macro from line 21 in Listing 3, which is used by checked_request2size . The theoretically maximum amount of bytes for a chunk allocation is thus subtracted by 2∗MINSIZE which would typically result in 2 32−32 byte on a 32 bit architecture. An allocation request must hence typically be smaller than 2 32 − 32 on a 32 bit architecture. When now using the maximum value that can be requested without generating an error (2 32−33) it results in the maximum possible chunk size of 2 32 − 24 (see line 30 of Listing 3).
Despite the maximum size defined in Glibc, a chunk with that size will most probably never be allocated. The reason for that is the limitation of the virtual address space and the fact that a large percentage of it is typically reserved for the kernel (typically about 1 GB out of 4 GB on a 32 bit architecture). But even if the kernel would not take a large percentage of the memory space, such
an allocation request would ask the kernel for nearly the whole virtual address space. Even if the operating system would theoretically be able to serve that space in the sense of physical space, the virtual address space is still limited and as the process itself needs a certain amount of memory space for its code and libraries (if nothing else, at least the Glibc library) it will not be able to fulfill this request.
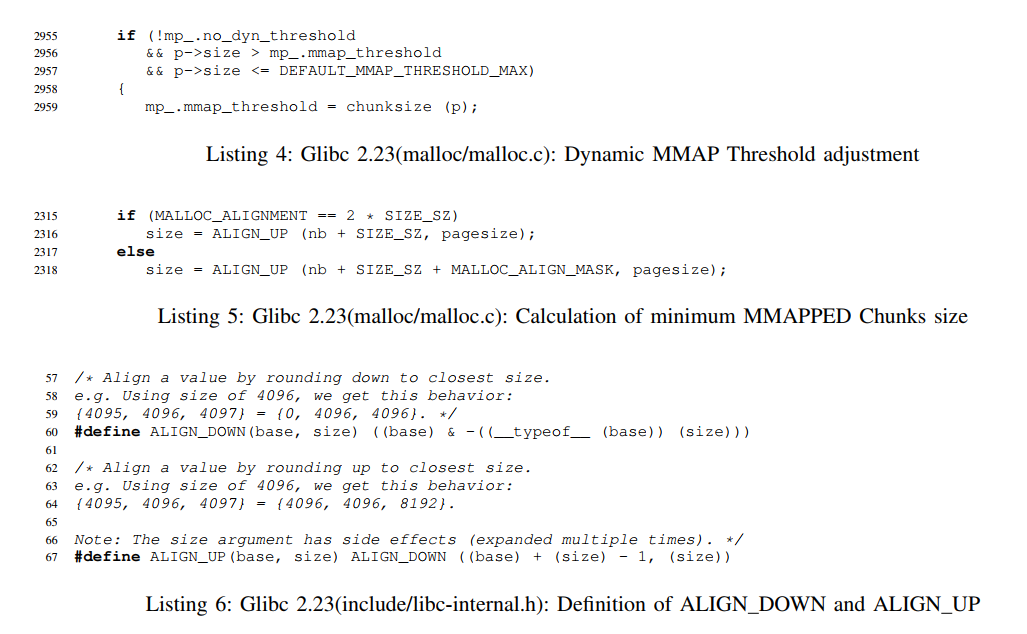
3) MMAPPED Chunks: MMAPPED chunks are in essence allocated chunks, that exceed a given threshold in size. Their name originates from the fact, that a dedicated memory region is requested or each chunk from the operating system using the API call mmap. Most probably for that exact reason, they are called MMAPPED regions in the mallinfo output (see Section IV-A on page 35). The threshold, which defines if the new allocation request should be served with a mmap call, is controlled with the malloc_par field mmap_threshold, which is in the beginning normally 128 ∗ 1024 and can be set manually by changing the mmap_threshold value during runtime (mp_; see also Section II-C1 on page 5). This is however not the only way this value might change. As long as the malloc_par member no_dyn_threshold is 0, the threshold might change dynamically during runtime. (It is for example set to 1, if the mmap_threshold is set manually using the mallopt function.) If not, the threshold is adjusted each time an MMAPPED chunk is freed, as can be seen in Listing 4. The threshold does however only increase (line 2956), and not exceed a given threshold (line 2957). That means, that there might be MMAPPED chunks with a size smaller than the current value of mp_.mmap_threshold . The maximum value for the dynamic threshold is defined by the DEFAULT_MMAP_THRESHOLD_MAX variable, which is typically 524288 for 32 bit and 33554432 for 64 bit architectures.
The mp_.mmap_threshold value can also be set manually via the mallopt function. The maximum value it can be set to is typically the same as for the dynamic threshold (see Section VII-B on page 49), but it can be set to an arbitrary low value like 1. When doing that, this means that all allocations are served with MMAPPED chunks, but does not lead automatically to chunks with a size of 1 or MINSIZE (see Listing 3). The reason for that is the mmap API call, which returns memory space in terms of pages. As it returns only a multiple of page size, the minimum amount of memory served by this function is one page (which is at least 4096 byte). Because the whole page is reserved for that one chunk (a follow up malloc call would again end in a mmap call, requesting more pages for the new chunk), there is no reason to not assign the whole space to this one chunk, which is why the size of an MMAPPED chunk is always a multiple of page size and at least as large as one page of the underlying operating system (see Section II-D3 on page 17 for further details). This can also be seen in the code excerpts in Listings 5 and 6. Lines 2316 and 2318 in Listing 5 are responsible for setting the new MMAPPED chunks’s size (nb is the size requested by the malloc call) and do that by the usage of the ALIGN_UP macro defined in line 67 in Listing 6.
Another characteristic of MMAPPED chunks is their usage of flags. While all MMAPPED chunks have the IS_MMAPPED flag set, none of them use the PREV_INUSE or NON_MAIN_ARENA flags. Furthermore, there are no freed MMAPPED chunks, which is why there is no need for the PREV_INUSE flag and hence leaves the prev_size member and all freed chunk pointers unused. When an MMAPPED chunk is freed, the whole memory space it is allocating is removed from the process space and returned to the operating system. Because there are no pointers from the bins or any structs to MMAPPED chunks and also no connection between themselves, each MMAPPED chunk stands alone and is only referenced by the returned pointer for the allocation call.
4) Freed Chunks and Bins: When talking about freed chunks in more detail, first the concept of bins needs to be understood. A bin can be seen as a container for freed chunks and bins always belong to a specific arena. To put it a bit more technically, they are in essence an array of pointers residing in the malloc_state struct (arena). If a chunk is freed within a certain arena, it gets added to a bin of that arena by setting the bins pointer to that chunk. Furthermore, it gets added only to a bin it fits in, as almost all bins allow only a defined size or size range. There are two types of bins: fastbins and emphnormal bins (which are referenced in this document simply as bin). The second type is again split up in two types: small bins and large bins.
Based on that information and going a step further, there are basically four different kinds of free chunks to distinguish:
Small Bin chunks Are freed chunks in a size range from 16 to 508 bytes on a 32 bit and 32 to 1008 byte on a 64 bit architecture belonging to a bin.
Large Bin chunks Are freed chunks in a size range from 512 byte on 32 bit and from 1024 byte on 64 bit architectures until the maximum size a chunk can have (belong also to a bin).
Fastbin chunks Are freed chunks in a size range from 16 to a maximum of 80 byte on 32 bit and from 32 to a maximum of 160 byte on 64 bit architectures (they belong to a fastbin).
Top chunks This chunk is not part of any bin, present exactly once in each arena and represents the left free space of its arena. See Section II-C5 on page 14 for more details.
A differentiation on those chunk types is especially important when trying to gather user data out of them (see subsections in Section II-D on page 14).
The first bin is neither part of the small nor large bins but contains freed chunks of arbitrary size without any size order. It is used for performance reasons as integrating a chunk in the according bin in the right position takes more operations than adding it to the unordered bin. Bins containing chunks with varying sizes are normally ordered by size, so for a new chunk the right position must be found and furthermore not only the new chunks pointers set, but also the pointers of the chunk before and after it. So if a new allocation is following a free call and a fitting chunk can be found in the arbitrary bin, some bin modifications and comparisons have been saved. Every chunk that gets freed (except for chunks being placed in fastbins) is at first placed in the unordered bin. The free function itself does not place any chunks into small or large bins. This is done by the malloc function on its next call. While testing each chunk in the unordered list for fitting the current allocation request, all other chunks are placed in the corresponding bin.
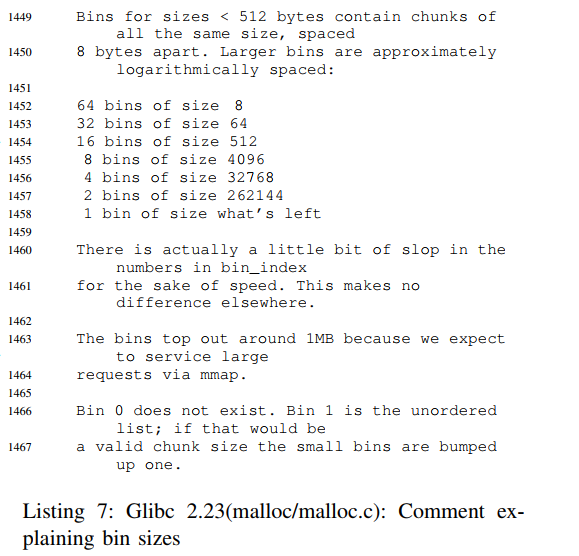
As mentioned earlier, bins are split up into small and large bins. More precisely there are 62 small and 63 large bins, where the small bins contain only chunks of the same size and the large bins contain chunks with a size in a specific range. The exact distribution can be seen in the comment in Listing 7 which is taken from the Glibc source code. This output is however not entirely correct. On the one hand, there is a misleading value regarding number of small bins. The comment speaks of 64 bins, each 8 bytes apart from its neighbor, but there are actually only 62 as bin 0 does not exist (this is also stated in the comment on line 1466, but only a mathematical issue as the first bin in the malloc_state’s bins array is definitively used) and the first bin is used for the arbitrary sized chunks. The second deviation concerns each first bin of a given size range starting with bin 112 and will be explained in more detail in the following paragraphs.
Looking at the small bins, they begin with bin 2 (when counting from one forward) and a size of 16 and go up to bin 63 with a size of 504, while each bin is 8 bytes apart from its neighbors and contains only chunks of the same size. It should be noted that the information from Listing 7 and in this and following paragraphs only apply for 32 bit architectures. The number of bins does not change however for other architectures, only the size of chunks placed in there are increased (for example are the small bins 16 bytes apart on 64 bit architectures).
Starting with bin 64, chunks can have sizes in a given range, which is noted in the last column in lines 1453 to 1457 in Listing 7. So the first large bin can contain freed chunks with sizes from 512 – 68 byes. All following bins until bin 96 each contain chunks of the same size range and are 64 bytes apart from their neighbors. This pattern continues according to the remarks until bin 112. While bins 112 till 119 should normally all contain chunks in a size range of 4096 byte, the first bin (bin 112) does only include chunks with a size range of 1536 byte (bins 113 till 119 behave as expected). This deviating pattern continues for each first bin of each new size range:
Size range 32768 First bin (bin 120) only includes chunks with a size range of 24576 byte.
Size range 262144 First bin (bin 125) only includes chunks with a size range of 98304 byte.
Besides those deviations, all other bins behave as expected and the last bin (bin 126) contains an ordered list of sizes not fitting in any of the other bins. A complete list with all bins and their size ranges can be seen in Section VII-G on page 53. This Section also shows the bin distribution when MALLOC_ALIGNMENT is set to an architecture atypical value (see also Section II-D2 on page 15) and for a 64 bit architecture, respectively. In both cases, the distribution differs from the one explained in this section and displayed in Listing 7, respectively. The program in Section VII-G on page 53 uses the bin_index macros, that are also used internally by the Glibc to decide which chunk is placed in which bin.
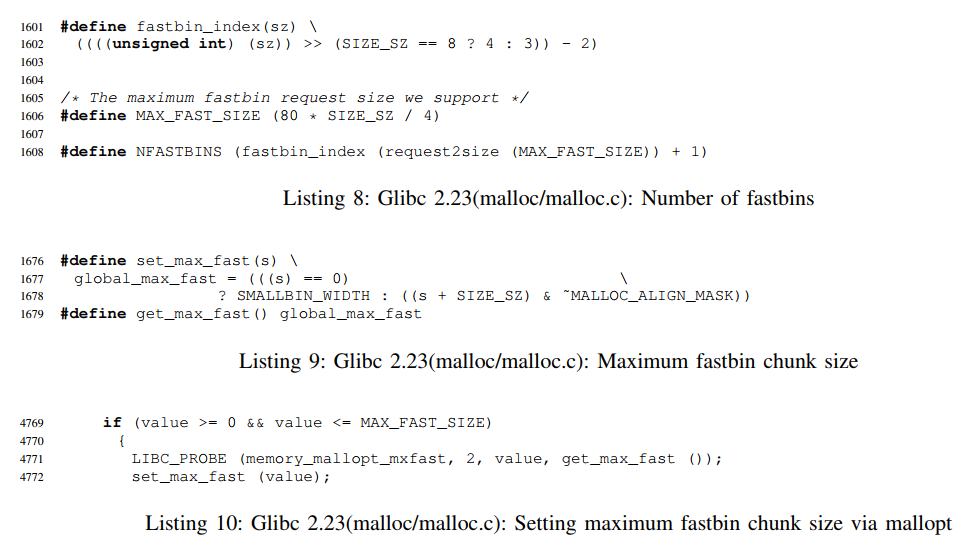
Fastbins are similar to small bins in the sense that they contain only chunks of the same size and are all 8 bytes (16 bytes on 64 bit architectures) apart. And like with the unordered list, the reason for the fastbins itself is their performance improvement while using them as fewer operations regarding e.g. pointer operations have to be made. However, there are only ten fastbins which is defined by the NFASTBINS (see Listing 8). Furthermore, only nine out of those ten fastbins are actually used for chunks. This can be seen for example in line 1608 of Listing 8 where NFASTBINS is calculated (SIZE_SZ has typically a value of 4 for 32 bit and 8 for 64 bit architectures). The macro fastbin_index returns the index into the fastbins array for a given size. In this
case, it is given the value of MAX_FAST_SIZE , which is Glibc’s internal maximum size for a fastbin chunk. So the index for the fastbin containing the biggest possible fastbin chunk is returned and assigned to NFASTBINS while adding one up to it. The last fastbin is hence normally never used and maybe only created for alignment reasons.
The maximum size for a fastbin chunk is returned by the macro get_max_fast shown in Listing 9 and for example used in the _int_malloc function when deciding whether or not an already existing fastbin chunk should be used. The macro returns the value of global_max_fast , which is calculated with the macro set_max_fast (line 1676 of Listing 9).
set_max_fast is typically called with the DEFAULT_MXFAST , which is 64 byte for 32 bit and 128 byte for 64 bit architectures. So normally, only seven out of 10 fastbins are used while fastbin chunks have a size from 16 up to 64 byte. It can however also be called manually via the function mallopt and when supplying the maximum possible value, nine out of ten fastbins are used. The relevant part of function mallopt is shown in Listing 10 (value is the given size for the new maximum fastbin chunk size).
When freeing chunks, there is also a difference between fastbin and bin chunks. In this scenario comes the PREV_INUSE bit and the prev_size field of the malloc_chunk struct from Section II-C2 on page 7 into play. If the current chunk that should be freed has a direct neighbor which is already a freed bin chunk or the top chunk, and the current chunk would not end up as a fastbin chunk, both are getting consolidated to one chunk. If the current chunk or the neighbors are fastbin chunks, no consolidation happens. The distinction is made upon the PREV_INUSE bit. If this bit is not
set, the previous chunk is considered free and ready for consolidation. A chunk following a fastbin chunks keeps its PREV_INUSE bit set and hence they are not consolidated on free and the next chunk’s prev_size field does not contain the fastbin chunk’s size.
If the current chunk is too big for any fastbin and the previous chunk is either a small or large bin chunk, they will be consolidated on a call to free. As there are no pointers to allocated chunks (which the current chunk that should be freed at this moment still is) and allocated chunks themselves keep no pointers to previous or next chunks, the task now is to figure out the beginning of the previous chunk (as this chunk gets the new freed chunk with an increased size). This is accomplished by the prev_size field which keeps the size of the previous chunk if it is a freed bin chunk (this is not the case for fastbin chunks). So by using the size of the previous chunk and the offset of the current chunk, the offset of the previous one can simply be calculated via subtraction. The last part now is to adjust the previous chunk’s size to reach until the end of the current chunk (the current chunk is assimilated) and to integrate the current chunk in the appropriate bin (for details see the following part of this section and Section II-D4 on page 18).
The second scenario is that the next chunk might be available for consolidation. In this case, there are two scenarios to distinguish:
1) The next chunk is the top chunk. The current chunk gets consolidated with it.
2) If not, the PREV_INUSE bit of the chunk after next (it is retrieved by simply adding up the chunks sizes) is examined, whether or not the next chunk (from the current chunk’s point of view) is in use. If not, the last step is similar the scenario with the previous freed chunk, except that the next chunk is first released from its bin and afterwards assimilated (the current chunk’s size is adjusted and added to the appropriate bin).
The last parts left from the malloc_chunk struct from Section II-C2 on page 7 are the members behind the size field. They all are pointers and used in conjunction with freed chunks. The first field fd is a forward pointer to the next free chunk of the same bin, which must not necessarily be located on a following address in the sense of memory space but can also be located behind that chunk. The counterpart is the field bk, which is a backward pointer and hence points the previous freed chunk of the same bin. In the case of small and large bin chunks, both pointers are used, realizing a doubly linked list. Those lists are also circular, which means that following e.g. only the fd pointer will iterate over all freed chunks of that bin over and over again.
There are two differences to fastbin chunks at this point. Fastbin chunks use only the forward link fd but not the backward link (or any other pointer) hence realizing a simple linked list (it does not loop). The fd field of the last freed chunk of a fastbin is hence set to null.
In the case of large bins, also the members fd_nextsize and bk_nextsize come into play. As already mentioned, large bins contain chunks of a given size range. So, those fields are used to point to the next/previous chunk with a different size. They are mainly used as a performance improvement as it speeds up traversing long lists of freed chunks while searching the right position for a new freed chunk for that bin (large bins are ordered by size in descending order: the largest chunks for that bin are the first chunks). While not all large bin chunks have those pointers set but only the first chunk of each size, those fields are still overwritten with null for all other large bin chunks. See also Section II-D4 on page 18 for further details.
5) Top Chunk: Each arena has one top chunk and holds a pointer to it. It represents the free space left in that arena and is used for allocation requests where the bins are not able to offer an appropriate free chunk. On such an allocation, the portion necessary to fulfill the request is used as the new allocated chunk and the rest becomes the new top chunk. If the top chunk does not offer enough space for the current allocation request, additional space is gathered either via a brk or mmap API call. For the top chunk, neither the NON_MAIN_ARENA nor the IS_MMAPPED flag are set but always the PREV_INUSE. While at first this might not be obvious for the NON_MAIN_ARENA flag, it definitely makes sense for the other two. In the case of IS_MMAPPED flag (for more details see Section II-C3 on page 9), the reason is obvious: there are no top chunks inside MMAPPED regions. Regarding the PREV_INUSE flag, there are two scenarios to consider:
1) The top chunk is the first chunk in the current memory region, which results in the same situation explained earlier in Section II-C5 regarding the very first chunk.
2) Freeing chunks residing directly before the top chunk are either getting fastbin chunks (in this case the PREV_INUSE is not unset; see also Section II-C4 on page 11) or consolidated with the top chunk, leaving the beginning of the memory region or a fastbin/allocated chunk before it, in which cases the PREV_INUSE again stays set.
D. The Memory View
The following sections describe how and where the structs, described in Section II-C on page 5, are stored in memory for a running Linux user space process that uses Glibc for heap allocations.
1) Arena and Heap Info structs in Memory: The main heap is a continuous region of memory containing all chunks of the main arena. While it is continuous, it can however get split up in multiple contiguous memory regions described by vm_area_struct structs. Its describing malloc_state struct is stored in the bss section of the mapped Glibc library and as already stated, no heap_info structs are used for the main arena.
The malloc_state struct for thread arenas however is stored together with chunks in the same memory region. More precisely, it is located right after the first heap_info struct and before the first chunk of that arena. Normally, a heap_info struct can be found at the beginning of each mapped memory region belonging to a thread arena. Besides that, there are also instances where further
heap info structs end up in the same mapped memory region. These can be related to the same arena but also to another one.
It can however be stated that at the beginning of a memory region belonging to a thread arena, normally always a heap_info struct can be found.
Fig. 5 on the following page illustrates the previously described scenarios and the information from Section II-C1 on page 5. Grey areas are memory regions described by vm_area_struct structs, structs and chunks marked in blue belong to the same arena and the ones in green to another. The pointers starting on the size member mark the end of the memory area described by the corresponding heap_info struct, ar_ptr points to its arena (malloc_state struct) and prev to the previous heap_info struct in the same arena.
Heap and stack are normally at opposite sides and grow towards each other. This is, in fact, true as long as the heap does only consist of the main arena without any thread arenas or MMAPPED chunks. But as soon as either one of them is introduced, this strict separation is broken. The MMAPPED chunks scenario is explained in Section II-C3, Section II-D3 and Section III-F. Similar
to MMAPPED chunks, the memory regions belonging to thread arenas most of the time get mixed up with memory regions containing stack frames for certain threads.
Regarding the value of an arena’s system_mem and a heap_info’s size member, respectively, those sizes must not necessarily correspond with the size of the associated memory regions. There have been instances observed, where slack space was at the end of an arena. More precisely, it was slack space right after the top chunk. In these cases, the top chunk did not consume the whole space until the end from the containing memory region but left some slack space.
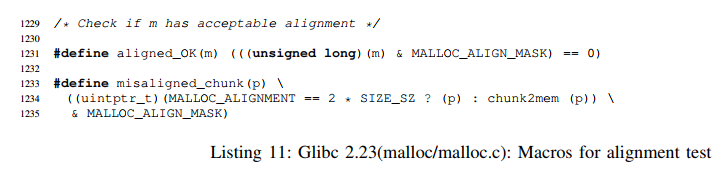
2) Allocated Chunks in Memory: As already described in Section II-C2 on page 7, the size of chunks is aligned. Alignment in this context does however not only apply to the size but also to the location of chunks. The address where each chunk starts is not arbitrary but controlled with the variables MALLOC_ALIGNMENT and MALLOC_ALIGN_MASK, while MALLOC_ALIGNMENT has typically a value of 8 for 32 bit and 16 for 64 bit architectures and MALLOC_ALIGN_MASK is for both architectures MALLOC_ALIGNMENT − 1 (see Listing 3 for their definitions). Glibc macros that test for a chunk’s alignment and use these variables are aligned_OK and misaligned_chunk , which are shown in Listing 11.
This means that chunks are typically located on an address that is evenly divisible by 8 on a 32 bit and by 16 on a 64 bit architecture, respectively. It should however be noted that it is possible to set MALLOC_ALIGNMENT to an architecture untypical value via compile-time options resulting in different address and size alignments.
Another fact to consider regarding the first chunk of an arena respectively a memory region described by a heap_info struct: This chunk might, in some cases, not be located right after a malloc_state or heap_info struct, but a few bytes after them. The reason for that is on the one hand the alignment requirement for the chunk’s starting address, as explained previously, and on the other hand the malloc_state’s and heap_info’s struct size, respectively. Because their size must not be evenly divisible by 8 and 16, respectively, there might be cases in which the next free space after those structs is at an address which does not satisfy the alignment requirement. This is for example the case for Glibc version 2.23 on a 32 bit architecture, as the malloc_state struct has a total size of 1108, which is not evenly divisible by 8. So for the first memory region of the thread arena, which contains a heap_info struct (total size of 16) followed by a malloc_state struct, the next free address would be 1124, but the next aligned address is 1128 which is where the first chunk will end up.
As previous Glibc versions like 2.22 and 2.21 did not have the attached_threads member for the malloc_state struct, which has a size of 4 byte on 32 bit architectures, the first chunk is stored in these cases right after malloc_state struct. This is for example conversely true for 64 bit architectures. Here did the attached_threads member make the malloc_state struct evenly divisible by 16, which was not the case on versions before Glibc 2.23.
The additional offset scenario is however not relevant for the main arena, because neither a malloc_state nor a heap_info struct are placed in the main heap memory region and the start address of the main heap is typically evenly divisible by 8 and 16.
Fig. 6 on page 17 illustrates an allocated chunk in memory. As can be seen, the user data starts right after the size member and reaches until the size member of the next chunk. So all members of he malloc_chunk struct following the size field are overwritten with user data. This goes a step further and should be explained in an example.
When allocating a chunk e.g. on a 32 bit architecture with malloc(500), a chunk with the value 504 (disregarding any flags) in its size member is created. But when calling the Glibc function malloc_usable_size, which returns the amount of bytes the given chunk can store, it will return 500. There is a second fact to take into account. As stated before, the data part begins right after the size member, while the size member itself defines the size of the whole chunk, starting with the current chunk’s prev_size member until the prev_size member of the next chunk. On a 32 bit architecture, this would normally leave only 496 byte for user data. The reason that the usable size is still 500 byte, shall be explained using the Fig. 6.
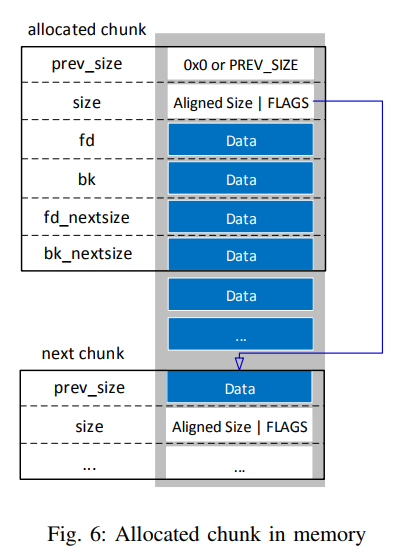
As can be seen, user data of an allocated chunk (in this case the chunk at the top) reaches from the fd member until the beginning of the size field of the next chunk while overwriting all blue fields with user data. As explained in Section II-C4 on page 11, the least significant bit of the size field is the PREV_INUSE bit, which determines whether or not the previous chunk is allocated or free and hence the prev_size field contains the previous chunk’s size. If the next chunk’s PREV_INUSE bit is set, which is the case for chunks following an allocated chunk, its prev_size member does not contain the size of the previous chunk but are simply part of the previous chunk’s user data. So for all allocated chunks within the main or any thread arena, the prev_size field of the next chunk is used to store data. This technique of using fields of a struct only in cases they are required and otherwise leaving them for other purposes is called boundary tags (see e.g. the survey of such techniques by Wilson et al. (1995, p. 28)).
From an external point of view, the amount of usable bytes can be calculated with one of the following formulas, where sizeof(FIELD) represents the size of the given field and not the value of that field (e.g. on a 32 bit architecture, the size field is typically an four byte unsigned integer: sizeof(size)=4 ) and chunksize is the value of the size member without any flags:

3) MMAPPED chunks in Memory: MMAPPED chunks are normally located in a dedicated memory region described by a vm_area_struct struct (see Section III-F on page 30 for exceptions), which contains one or more of such chunks. As described in Section II-B on page 3, there are no pointers from meta structures like malloc_state or heap_info that reference the memory regions or the chunks themselves. While those regions are often located near other heap related memory regions, they can also be stored somewhere else in the process address space (e.g. between mapped files).
Similar to their size, which is always a multiple of page size (see Section II-C3 on page 9), they are always located at an address that is evenly divisible by page size. This is due to the mmap API function that returns the memory space for the requested chunk, which not only returns a size but also an address on a page size boundary. Moreover, despite the fact that each MMAPPED chunk results from a separate mmap call, multiple MMAPPED chunks can end up in the same memory region described by one vm_area_struct struct, as the kernel can simply enlarge a region. On the other hand, a continuous memory region can get split up in two separate regions if an MMAPPED chunk, located between two or more MMAPPED chunks from the same region, is freed (its related pages are returned to the operating system).
As described in Section II-C3 on page 9, the requested size for a chunk (when exceeding the mmap threshold) is increased to the next highest value evenly divisible by page size with the macro ALIGN_UP, as mmap returns anyways a memory region that is a multiple of page size. Despite that fact, there are still scenarios in which an MMAPPED chunk does not use the whole memory region returned by the mmap call. The memory region returned by mmap in such cases was at least one page size larger than the size requested by the Glibc implementation (after aligning it up). This leaves some slack space (similar to the scenario described in Section II-D1 on page 14) right after the last MMAPPED chunk for a given memory region that typically consists only of null bytes.
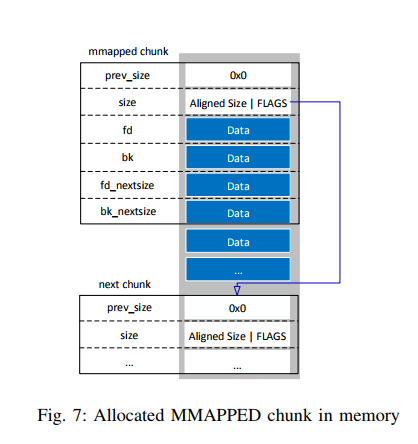
The calculations for the usable size of an allocated chunk done in Section II-D2 on page 15 are not valid for MMAPPED chunks as they do not use the prev_size member of the next chunk. This is also illustrated in Fig. 7 on the following page. There are two reasons for that:
- It is not guaranteed that an MMAPPED chunk is followed by another chunk, whose prev_size could be used for data (e.g. in the case of only one MMAPPED chunk, or for the MMAPPED chunk
at the end of a memory region). - Even if the current MMAPPED chunk has a following chunk whose prev_size could be used, as soon as the following chunk is freed, its memory space is removed from the current process and would hence lead to missing data.
The usable size for an MMAPPED chunk can be calculated with the following formula:
![]()
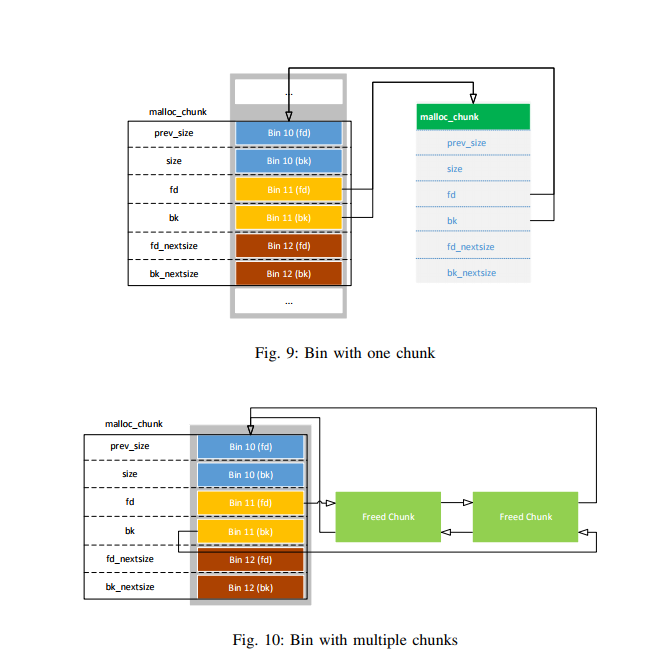
4) Freed Chunks and Bins in Memory: At the beginning of an arena, all bins and fastbins are empty. This is however realized in different ways. In the case of fastbins, their pointers are all initialized with zero, while bins have a pointer to themselves. How this referencing works shall be explained using the following figures. The first Fig. 8 shows three bins and the initial situation for bin 11, whose pointers are still referencing itself. However, when looking solely at those pointers, it seems like they reference the previous bin. The reason for this is that they are pointers to a malloc_chunk struct. As each bin contains a forward and a backward link, the initial pointers do not really point to a previous bin or to themselves, but to the position where a chunk would be stored, if bin 11’s fd and bk pointers are those of a malloc_chunk. The template of an imaginary chunk (drawn in black) in Fig. 8 tries to visualize this scenario.
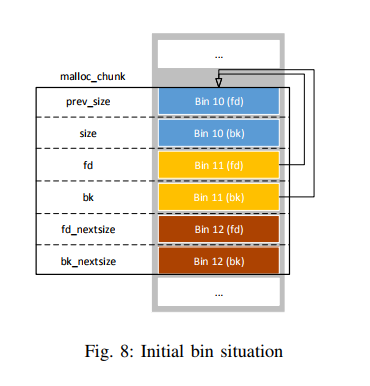
Taking this a step further, Fig. 9 on the next page shows the situation in which bin 11 contains exactly one chunk. As can be seen, the real freed chunk (on the right side) references the imaginary chunk in the arena, so that this chunk’s fd and bk pointers match with bin 11’s pointers.
The last general modification is done when multiple chunks are part of a bin. This is illustrated in Fig. 10 on the facing page. As can be seen, the bin’s backward pointer points to the last chunk of that bin (which is the chunk with the smallest size) and the forward pointer references the first chunk (the biggest one). On the other hand, the first chunk’s bk and the last chunk’s fd pointer
both reference the imaginary chunk in the arena and hence realize a circular doubly linked list.
The scenario with fastbins is a bit different. As already noted, initially all fastbin pointer are set to zero and as described in Section II-C4 on page 11, fastbin chunks only use the fd pointer and are not linked circularly. If a chunk is included in a fastbin, a simple malloc_chunk pointer is created and beginning with the first fastbin chunk, the fd field is used to point to the next chunk but none of them points back. Hence, there is no scenario in which a reference points back to another fastbin in order to realize an imaginary chunk whose fd field would end up at the correct offset for the current fastbin. If all chunks of a fastbin are reallocated, the arena’s fastbin pointer is again set to zero.
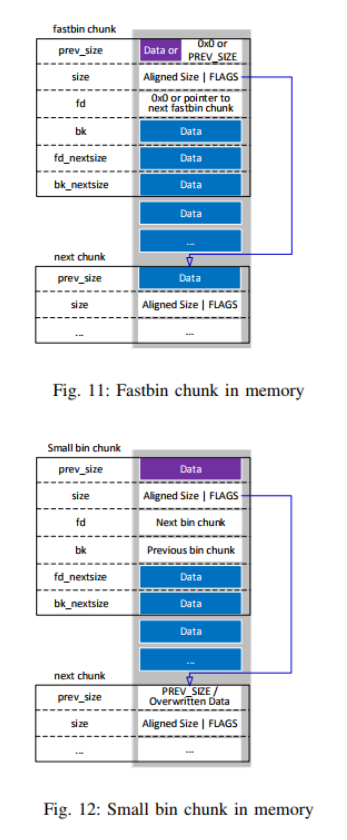
Continuing the usable amount of space calculations for allocated chunks described in Section II-D2 on page 15 and Section II-D3 on the previous page, the four different kinds of free chunks shall be examined for their amount of potentially not overwritten amount of data. In the case of a fastbin chunk, the only part that differs is the increased offset for the beginning of remaining user data. As can be seen in Fig. 11 on the following page, the fastbin chunk uses the fd member and hence overwrites any potential data at that position. Parts marked blue are data from that fastbin chunk, parts marked in purple are data from other chunks. The area for non-overwritten data starts with the bk field and reaches until the size member of the next chunk, like with an allocated chunk, because the PREV_INUSE flag is not unset for fastbin chunks and hence the prev_size field of the next chunk is not overwritten with size information (see also Section II-C4 on page 11).
Using the last calculation example from Section II-C2 on page 7, the following formula can be derived for the amount of not overwritten user data:

Regarding the case of a small bin chunk, there are slightly more differences. As can be seen in Fig. 12 on the next page and explained in Section II-C4 on page 11, all freed bin chunks use the fd and bk members for the doubly linked list. This means that any potential data at that position has been overwritten and that the earliest offset for extractable user data starts with the fd_nextsize member. On the other hand, as the PREV_INUSE flag of the next chunk is set for this freed chunk, the prev_size field of the next chunk now contains a size value, hence not containing any user data anymore. The formula for the amount of not overwritten user data can now be calculated as follows:

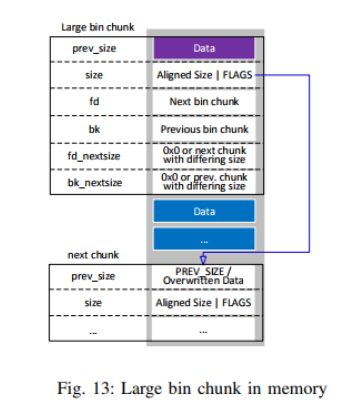
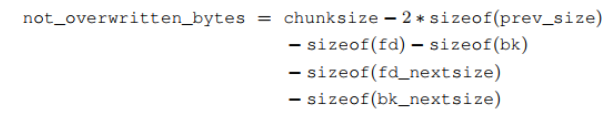
An interesting example are large bin chunks. As they also use the fd_nextsize and bk_nextsize members, which are the last members of the malloc_chunk struct, and like with small bin chunks the prev_size of the next chunks does not contain user data anymore, their remaining data part reaches exactly from the end of the current chunks struct until the beginning of the next chunks struct see Fig. 13). The amount of not overwritten user data can be calculated as follows:
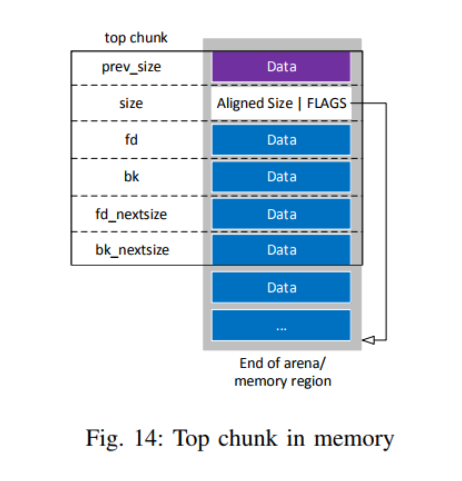
The last case is the top chunk. As this chunk does not use any pointers, the data part starts like with allocated chunks right after the fd member and as it is the last chunk in an arena (and most of the time ends right at the memory region boundary), there is no following chunk whose prev_size field could be used (see also Fig. 14 on the facing page). The amount of not overwritten user data
can hence be calculated using the following formula:
![]()
E. The Bottom Chunks Scenario
This section explains two chunks that are located at the bottom of a heap region (one described by a heap_info struct), that does not contain top chunk. Those chunks do not fulfill the requirements of normal chunks and might contain user data.
When the top chunk for a certain arena does not serve enough space for a new malloc request, the sysmalloc routine is used to decide how this request is handled. There are in essence four different scenarios regarding how this request ends up:
1) If certain conditions are met (like the request size must be at least as large as the mmap_threshold), a new memory region is created that serves space for an MMAPPED chunk (see Section II-C3 on page 9).
2) If the given arena is the main arena and scenario 1 has not been succeeded/is not be used, the main arena is simply enlarged using brk.
3) If the given arena is not the main arena, the heap is enlarged if the new value does not exceed HEAP_MAX_SIZE (see Section VII-B on page 49) and otherwise a new heap is created (including a heap_info struct at the beginning of the new memory region).
4) If scenario 2 failed and no arena has been specified, the malloc request fails.
If a new heap is created (second part of scenario 3), it results in some modifications of the old heap. These include at least the creation of a new top chunk within a new a heap region and the decrease of the old top chunk by some bytes.
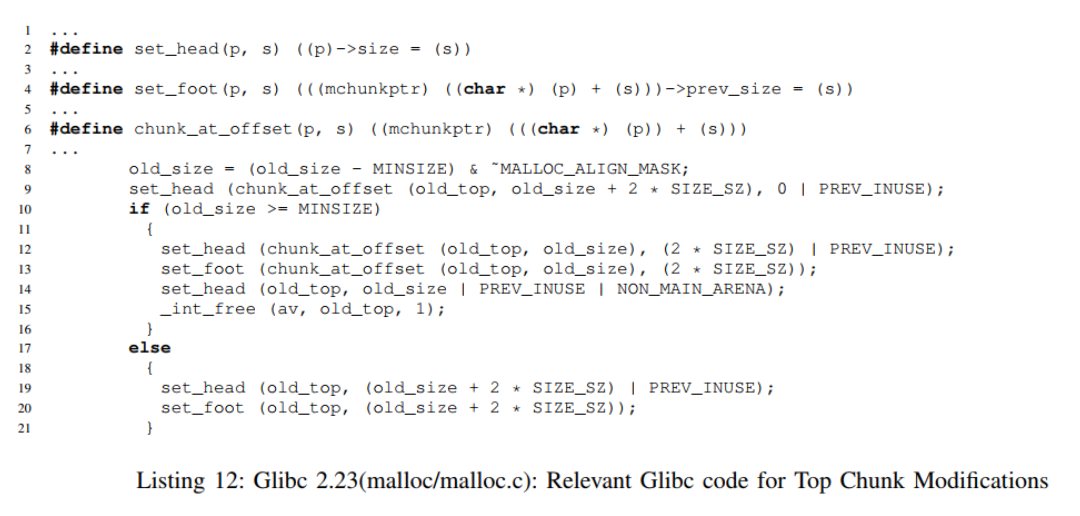
Which further modifications are taken depends on the available space of the old top chunk. The following Listing 12 represents the relevant code excerpts for all possible modifications.
Independent from a certain initial situation, at least the following modifications are done:
- The macro set_head from line 2 sets the given chunk’s size.
- The macro set_foot from line 4 sets the prev_size field of the next chunk.
- The macro chunk_at_offset from line 6 returns a chunk at offset p + s.
- Line 8 decreases the top chunk’s size by MINSIZE bytes.
- Line 9 sets the size field of the last chunk (in essence the last 4 bytes of the memory segment) to 0x1, which means a chunk size of 0 with the PREV_INUSE bit set.
The if and else statement will be explained in detail in the following sections. However in both cases, exactly two bottom chunks are created that do not conform to the properties of a chunk in general.
1) Following the if Statement: If the newly calculated old_size is at least as big as MINSIZE , the if branch is executed. Describing that scenario and the commands executed in natural language:
- The size of the old top chunk has been decreased by MINSIZE .
- In the case of the if statement, the bottom chunks both take exactly a size of MINSIZE which is why this value is subtracted.
- The if statement hence tests if the rest of the old top chunk leaves enough space to create a chunk that fulfills the minimum size requirement.
- As in this case two chunks use the space that normally is at least required for one chunk, those chunks do not fulfill the minimum size requirement for chunks.
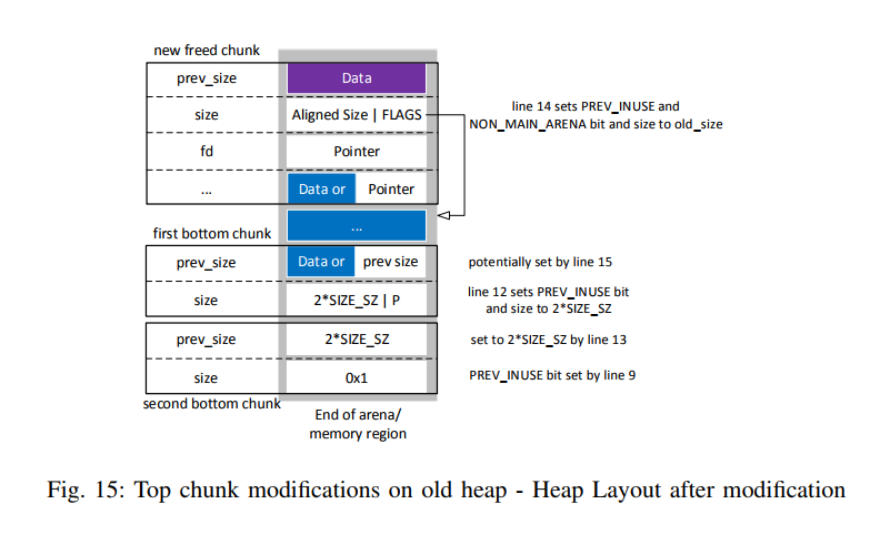
- The if statement essentially creates the first bottom chunk (see also Fig. 15 on page 23 and Section II-E3 on the following page), sets the second bottom chunk’s prev_size field and frees the rest of the top chunk.
Figure 14 and 15 illustrate those modifications. The initial situation is the same as illustrated in Fig. 14, with the top chunk as the last chunk. The location of the top chunk plus its size points to the end of the heaps memory segment (indicated by the pointer at the right corner of the Figure).
Fig. 15 on page 23 shows the resulting heap layout after following the if statement. As can be seen, the old top chunk has been changed to a normal freed chunk, which is part of a bin or fastbin and whose size now points to the beginning of another chunk. The bytes after the new freed chunk and before the end of the memory segment are now used for two new chunks (the bottom
chunks) created by lines 9 and 12, each of them having an absolute size of SIZE_SZ∗2. These chunks contain only size information but no user data anymore. Annotations like line 14 in Fig. 15 on the next page reference the corresponding line from Listing 12 and relate to the according field on the same altitude.
2) Following the else Statement: Regarding the else statement, there are two scenarios in which this branch is executed.
1) The old top chunk leaves exactly enough space for the two bottom chunks (MINSIZE bytes) but not more.
2) The old top chunk is larger than MINSIZE but smaller than MINSIZE ∗ 2.
In both scenarios, no additional freed chunk is created from the old top chunk. In the first scenario, the old top chunk is simply transformed in the two top chunks, again each with a size of SIZE_SZ∗2. In the second scenario, the old top chunk is again transformed in the two bottom chunks, but the first one (see Figure 15) has a bigger size and might contain user data. The amount of not overwritten user data depends mainly on the architecture. In can be calculated using the following formula:
![]()
This scenario only occurs if the old top chunk’s size is smaller than MINSIZE ∗ 2 and hence leaves at most 8 byte of not overwritten data for 32 bit and 16 byte for 64 bit architectures. As however the second half of that space consists of the old top chunk’s size field, only 4 byte for 32 bit and 8 byte for 64 bit architectures, respectively, of actual remaining user data can be found in that chunk at most. Regarding a 32 bit architecture, the following section illustrates the different scenarios using a live example.
3) Live Example: The following listings illustrate the different bottom chunk scenarios and use a chunk annotation that is taken from the Rekall plugin described in Section III-G on page 32, as this plugin has been used to analyze the bottom chunk scenario. The basis for this example is the program Bottom chunks from Section VII-D on page 51. One relevant function that is used by this program is fillHeapWithChunks (see Section VII-G on page 53), which fills a heap region (described by a heap_info struct) with chunks until its maximum size, but leaving at least SIZE_SZ∗2 bytes of free space. It can however be called with a value greater than zero for the second argument, which leads to more free space between the last chunk and the end of the heap: SIZE_SZ∗ 2 +argument. The first argument to that function is only used to compensate the additional size of the malloc_state struct in the first heap.
The output in the following Listings represents the relevant parts of the malloc_chunk struct for the respective chunk and are the result from the Vtype language used by the Rekall framework, but with slight modifications for a better understanding (like renaming and stripping). The hexadecimal value after the @ is the chunk’s location and the value in the first column before each struct member is that field’s offset within that struct. The value at the end of all other lines and sometimes in square brackets is that field’s value.

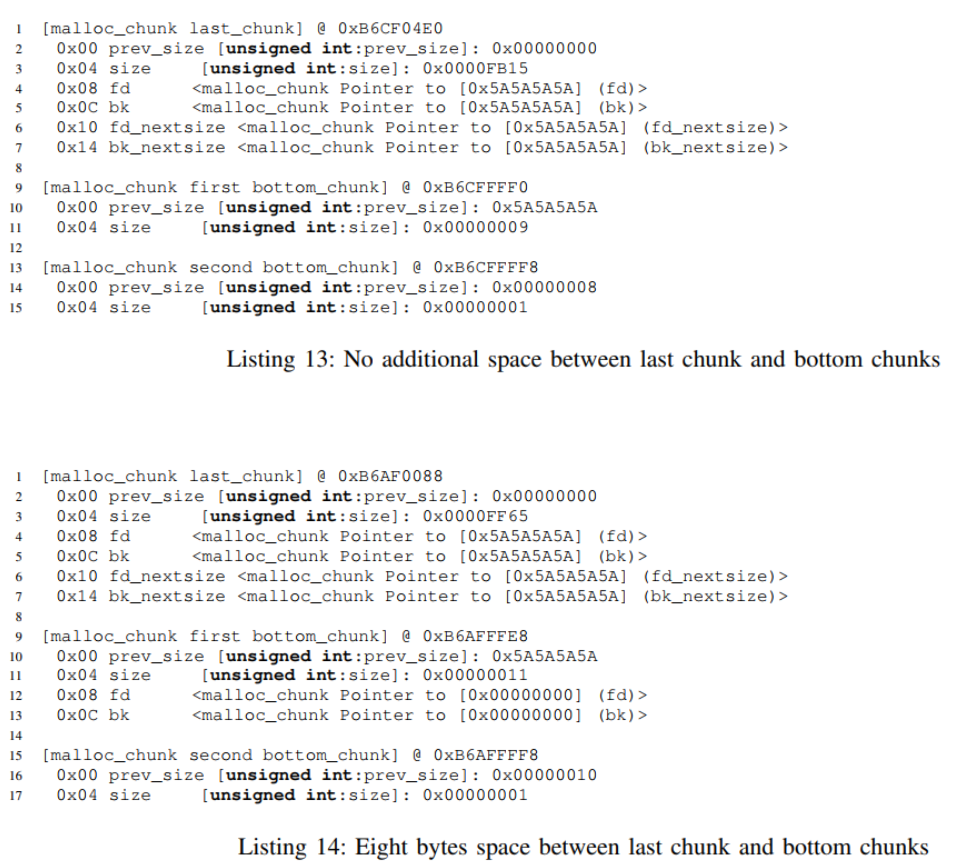
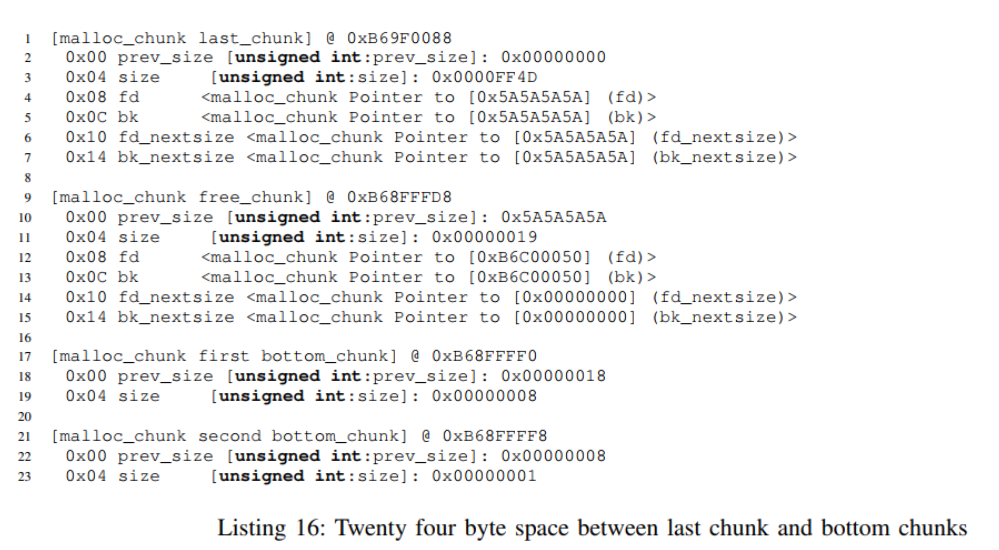
The first Listing 13 illustrates the result from the first fillHeapWithChunks call in line 10 of Listing 39 and an additional malloc call afterwards (realized by going until the next fillHeapWithChunks call) and represents the first scenario of the else statement. As can be seen, the last_chunk fills up the entire space until the last two bottom chunks, leaving them each with a size of 8 bytes. The fields fd , bk and so on of the last_chunk and the prev_size field of the first bottom chunk do not contain pointers or an actual size, but only the user data from chunk last_chunk (in this case the string ZZZZZZZZZZZZZZZZ…ZZZZ).
The next Listing 14 illustrates the result from the second fillHeapWithChunks call in line 14 of Listing 39 and an additional malloc call afterwards and represents the second scenario of the else statement. The relevant changes to the previous Listing are the decreased size of the last_chunk and the increased size of the first bottom_chunk . The additional space in the first bottom_chunk is also indicated by showing the fields fd and bk , which do not contain any pointers, but not overwritten data from this part of the heap. So if an allocated chunk had user data on that position, it would now be probably still there. A proof of concept program can be found in Section VII-E on page 52 while Section VII-F on page 53 is showing an example output when dumping such a chunk.
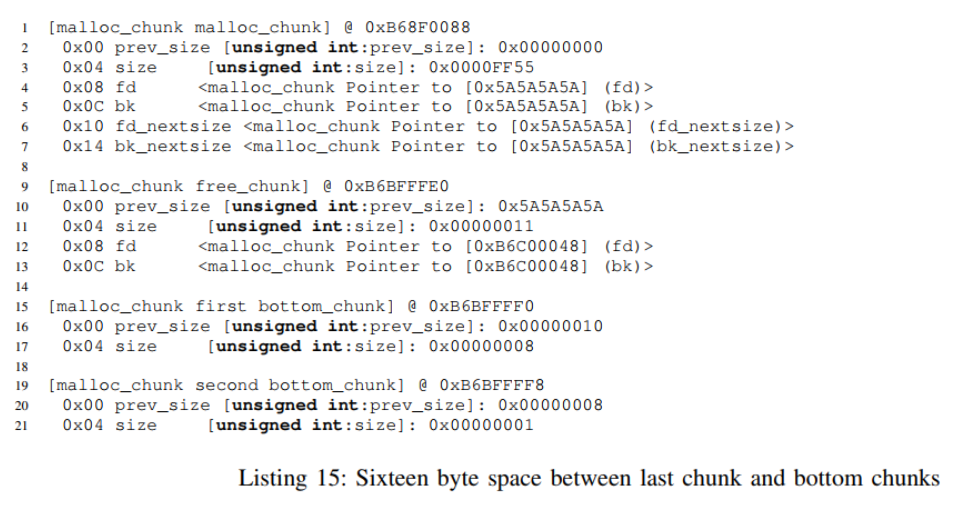
The following Listing 15 illustrates the result from the third fillHeapWithChunks call in line 18 of Listing 39 and an additional malloc call afterwards and represents the first scenario in which the if statement gets executed. As can be seen, in addition to the last_chunk there is a free_chunk which is also part of a bin (the fd and bk pointers are set). This results from the 16 byte between the last_chunk and the space necessary for the bottom chunks, that are now fulfilling the requirement from Listing 12, line 10.
Listing 16 just illustrates what happens if the free space increases but stays beyond the required size of the current malloc request. The size of the free_chunk simply increases, the prev_size of the first bottom_chunk is set accordingly and everything else stays pretty much the same.
When running all scenarios on a 64 bit architecture, the only thing that differs is the amount of bytes needed to change between the different scenarios and the size of the first bottom_chunk in the scenario described by Listing 14 is 32 byte, leaving 16 byte of not overwritten data.
III. Plugin Implementation
The following sub sections describe the Python class HeapAnalysis, which represents the implementation of all analysis results described beforehand and the last sub section III-G the heap analysis plugins, which are based on that class. Our implementations are an extension to the Rekall Memory Forensic Framework (Google Inc, 2016c) and have been tested with Rekall versions 1.5.1 and 1.5.2.post1. At the point of writing, they support at least the Glibc versions 2.20, 2.21, 2.22, 2.23 and 2.24 on x86 and x64 architectures.Glibc version 2.24 was released after this research started and hence was not the basis for this work, but been tested against.
A. The HeapAnalysis Class
All plugins mentioned in this work are essentially Python classes that simply inherit from HeapAnalysis and use its methods to gather all relevant information, such as allocated chunks, to perform their analysis. The following list describes the most relevant public functions offered by the HeapAnalysis class that are intended e.g. for manual testing or plugin development.
init_for_task The function covered in Section III-B on the next page and normally the first function to use. It is responsible for initializing the HeapAnalysis class for a given task/process.
get_all_chunks This function returns all chunks that can be found (no matter if freed, allocated or MMAPPED). There are also functions for each chunk type and also the most relevant subtypes. They include get_all_freed_chunks, get_all_freed_bin_chunks, get_all_freed_fastbin_chunks, get_all_allocated_chunks, get_all_allocated_thread_chunks, get_all_allocated_main_chunks and get_all_allocated_mmapped_chunks.
get_main_arena Returns the internal main arena (either the real or the dummy arena).
search_chunks_for_pointers Searches all chunks for the given pointers and returns the ones containing at least one pointer (is e.g. used for the analysis of the zsh command history; see Section V-A on page 36).
get_aligned_address This function is mostly relevant for developing plugins. It takes a given address and returns an address, that is aligned regarding internal settings (see Section II-D2 on page 15)
get_aligned_size Works similar to the request2size macro explained in Section II-C2 on page 7. It is also mostly relevant for developing plugins. A scenario in that it for example gets relevant: If an investigator knows that a given struct is used by a process and knows its size, he can use this function to get the size of the resulting chunk and explicitly search for those chunks (see for example Section V-A on page 36).
chunk_in_use This function determines, if the given chunk is in use (not freed). It does that by taking a given chunk, gathering its next chunk, looking at that PREV_INUSE bit and afterwards returns true or false accordingly.
get_mallinfo_string It returns a string containing an output that is comparable with the mallinfo struct and the default print output, respectively (see also Section IV-A on page 35).
activate_chunk_preservation By calling this function it forces all allocated chunks to be stored in lists, which highly increases the speed of a second walk over those chunks. So plugins that need to iterate the chunks at least two times should use it (e.g. heapdump uses it).
to_string This function is not offered directly by the HeapAnalysis but by the malloc_chunk class. Hence, it can be called on each chunk instance returned from the HeapAnalysis class and returns the relevant data part as calculated in the subsections of Section II-D on page 14 (e.g. it omits the fd and bk field for a small bin chunk).
The HeapAnalysis is typically initialized for a given task on which it operates. From a high level perspective, the HeapAnalysis class works as follows:
1) The class instance is initialized for a given task (see Section III-B).
2) If the current task is no kernel thread, it tries to load the appropriate Glibc profile (see Section III-C on the next page).
3) One of the main tasks now is to gather the main arena (see Section III-D on page 28). This arena is important as it holds the bin information, a pointer to the other arenas and is used, due its location in the Glibc library, as verification during the initialization process (see Section III-D on page 28).
4) If the main arena has been found, its first chunk and, if existent, all other arenas are initialized.
5) If more than one arena is existent, all heap_info structs are enumerated and for each, their first chunk gathered.
6) The last step is to find any memory area that contains MMAPPED chunks and to get their first chunk.
7) The instance is now ready and all chunks can be walked. Walking in this context means, the current chunk’s position plus its size is used to find the next chunk within the same memory region.
B. Initialization for a given Task
The relevant function at this point is init_for_task, which expects a task object as argument. This function controls all relevant functions used for the initialization process. If no major problem occurs and it returns true, the HeapAnalysis instance should be successfully set up and ready to walk chunks (see Section III-G on page 32). If something went wrong, it returns false and resets itself, which means process specific initializations, made before the error occurred, are revoked. This reset procedure is also called at the beginning of the init_for_task function, so no process specific information is kept anymore (relevant if a plugin is used for multiple processes).
The task object argument originates from the LinProcessFilter instance and provides all details about a given process that can be gathered at the moment by the Rekall framework. The first attribute of the task object that is examined is mm, which correlates to the mm member of the process’ task_struct struct. As kernel threads normally have no associated mm_struct, this attribute can be used to easily exclude any kernel threads from the analysis, as the current heap analysis does not apply to the kernel.
If the current task is not a kernel thread, the linked list of vm_area_struct structs is used to initialize the Glibc profile. This step is repeated for every task, as processes can use different Glibc versions (takes effect if no debug information is provided by the investigator; see Section III-C on the next page). Depending on whether or not debug information for the current Glibc version are available, the global variable mp_ (see Section II-C1 on page 5) is gathered from the mapped Glibc library, which will later serve as a verification regarding hidden MMAPPED chunks (see Section III-F on page 30 and Section IV-A on page 35).
If a Glibc profile is successfully loaded, init_for_task now tries to gather the main arena (see Section III-D on page 28). Depending on whether the main arena has been found in the loaded Glibc library or if the dummy arena has been created (see also Section III-D on page 28), the following steps differ. In the case the real main arena has been found, the first step is to verify that the circular linked list of arenas does loop and not contain more members than expected (see also Section II-C1 on page 5). The outcome of this test does however not stop the further initialization, but only print a warning if something unexpected has been detected. Now, all arenas contained in the linked list are initialized:
- The arena objects are kept in a list that is an attribute of the HeapAnalysis class instance.
- The bin and fastbin chunks for each arena are put in an arena specific list (each arena object has one list for bin and one for fastbin chunks). The reason for this step is efficiency. The freed chunks are used for tests on each chunk while walking allocated chunks in the memory (see also Section IV-A on page 35). As gathering the chunks each time from the memory dump would be very time consuming, they are kept in a list in memory where iterating over them is way faster.
- The top chunk is set as a separate attribute (see Section III-E on page 30).
- For all thread arenas, their corresponding heap info structs are gathered and kept in an attribute for that arena. The process of getting them can be explained with Fig. 5 on page 16.
– As shown in the most right memory region, the top chunk is located at the bottom in the second part of that region.
– First the memory region described by a vm_area_struct struct, containing this top chunk is gathered.
– The beginning of that memory region is now interpreted as a heap_info instance.
– If the top chunk is located within its range (is determined with heap_info’s size field), this instance is returned.
– If not, all following heap_info structs are gathered, until the correct one is found or the end of the surrounding memory region is encountered.
– As soon as the correct heap_info struct instance is gathered, it is tested if its ar_ptr field points to the current arena.
– If that is the case, the prev field is used to get all other heap_info structs (the one residing at the top chunk is the last one, so no need to look forward).
- After gathering the heap_info structs via the top chunk, a verification process starts that tries to find heap_info structs in all memory regions and compares that result with the already gathered heap_info structs. This process is described in more detail in Section IV-A on page 35.
- In the case of the main arena, the first chunk from the main heap memory region is gathered, which eases the task of walking the chunks later on.
- For all thread arenas, the first chunk is not held in the arena but in its heap_info objects, as they are the relevant descriptors for the corresponding memory regions.
The initialization process for the dummy arena scenario differs. On the one hand, there are no further arenas to be examined and on the other hand there are no usable bin and fastbin pointers from the dummy arena (see Section III-D on the following page and Section III-E on page 30). While it would be possible to gather at least freed bin chunks from the memory region, there are obviously none to gather (which is why the dummy arena scenario is used). And as freed fastbin chunks cannot be retrieved solely from memory, as they are not easily differentiable from allocated chunks (the next chunk keeps its PREV_INUSE bit set; see Section II-C2 on page 7), all bin lists stay empty and the only elements left to initialize are the first chunk and the top chunk. Both can be gathered by simply walking chunks in the main heap. The first chunk is located at the beginning of the memory region and the top chunk is the chunk, whose size reaches until the end of the memory region. Another difference is the fact, that the dummy arena’s system_mem value is empty (because it cannot access the real field). It is simply set by calculating the difference between the end of the main heap (calculated by the offset of the top chunk plus its size) and the beginning of the main heap’s memory region (gathered from the vm_area_struct struct).
The last step for both scenarios is to initialize the MMAPPED chunks, which are kept in a list attribute with the main arena object (no matter if dummy arena or not). Basically, this is done by looking at the beginning of all memory regions that are not known to be already part of an arena or contain a mapped file and then checking, if the data at this position complies with the existing knowledge about MMAPPED chunks (see Sections II-C3, II-D3 and III-F for details). As there are however also scenarios in which MMAPPED chunks hide somewhere behind other data, this approach is not sufficient and gets extended under specific circumstances. See Section III-F on page 30 for details.
After successful initialization, the functions listed in Section III-A on page 25 can be used to walk all chunks and gather further information.
C. Glibc profile
Because the debug information from Glibc are not included in the operating system specific profile (as it is gathered from the kernel that contains no details about Glibc’s heap implementation), they must be provided in a different way. In the context of Glibc, the most relevant debug information to have are the struct details for malloc_chunk, malloc_state and heap_info. Also relevant, but not absolutely necessary, are the constant offsets for the two global variables main_arena and mp_. The offset to main_arena is only important if there are no further arenas and no freed bin chunks in the main heap to get the main arena (see also Section III-D), and primarily relevant to differentiate allocated chunks from fastbin chunks. The offset to mp_ is relevant for result verification (see Section IV-A) and to detect the existence of hidden MMAPPED chunks (see Section III-F). Besides that, these constant offsets are not important to explore the heap.
The ideal scenario is that the investigator has some sort of access to the debug information of the Glibc library in use, and can provide it to the plugin. While debug information is typically in certain sections in the ELF file, they normally cannot be extracted from the mapped file in memory, as those sections are normally not loaded in memory. They hence must be gathered e.g. from the ELF file on disk, which requires in most scenarios local access to the target system. This information can then be provided to the plugins (see Section III-G) and the HeapAnalysis class will use them internally.
But in the context of a Glibc profile, there might be a further option, depending on the current scenario. The problem with custom kernels and the need for a custom profile is not that similar to the generation of a Glibc profile. While most distributions build their own Glibc version with custom compile flags and/or patches to the source code, which potentially results at least in varying constant offsets, the retrieval of this debug information might be much easier. The reason is that many Linux distributions come with binary packages. That means, software like Glibc is not compiled on the target system, but the software is pre-compiled. If the investigator knows which Glibc version is in use, he simply can download the binary package (most of the times also the debug package) from a repository server, and extract the relevant information from it.
All the previous options might however not always be available.
- The target system could be locked and the credentials are unknown.
- Local access might be available but the operating system is outdated and the repositories do not serve the necessary packages anymore.
- The Glibc version could be customized and compiled without debug/symbol information, while no details are available on how it has been compiled (e.g. with which compile flags).
If the investigator still manages to get a working profile for the target operating system (e.g. by building a similar machine and creating it), but fails to generate an appropriate Glibc profile (e.g. the one used on the target system is customized), he is in most cases still able to investigate the heap of user space processes with plugins using the HeapAnalysis class. The reason is, the Python module containing the HeapAnalysis class comes with two additional classes called GlibcProfile32 and GlibcProfile64 (the first for x86 and the second for x64 architectures). They implement a basic Glibc profile that serves the relevant structs for the currently supported Glibc versions (see Section III-G). If the user does not provide debug information, a profile is automatically
loaded using one of these classes.
The only task at this point, besides choosing between a 32 bit or 64 bit architecture profile, is to determine the Glibc version used by the current process. This is important, because with version 2.23, the malloc_state struct got a new field (attached_threads; see also Section II-D2 on page 15). The question to answer is hence: Is the Glibc version smaller or greater/equal to 2.23? As no debug information is available, this detail must be gathered elsewhere. At this point, the linked list of vm_area_struct structs comes again into play. By examining the file object of the vm_area_struct structs, holding the mapped Glibc module, this version information can typically be extracted from memory. The library’s filename on disk contains normally the version string (e.g. libc-2.23.so) and thus does the file object. This version information decides now, which version of the malloc_state struct definition is used and the Glibc profile is loaded.
The only debug information missing in this last scenario are the constant offsets for mp_ and main_arena. But as mentioned in the beginning, this fact does not always prevent a successful heap investigation.
D. Getting the Main Arena
One of the first tasks the HeapAnalysis class is performing during its initialization is to locate the main arena. Besides holding important information such as the arena’s size and the bin pointers, its location within the mapped Glibc library is a good indicator that the information examined during the search process are correct (the details will be explained in this section).
The class HeapAnalysis implements different techniques to get the main arena. The most reliable method to get the main arena can be used if debug information, or more precisely, the constant offset for the main_arena symbol is available. This is typically only the case, if the investigator gathered the relevant debug information upfront (e.g. from the target system) and provides them
to the plugin (gathering it from the memory dump is not easily possible; see Section III-C on the preceding page). If that is the case, the location of the main arena can be easily calculated. As the main_arena offset is relative to the start of the mapped Glibc file and not an absolute address in the virtual address space, the only information besides the main_arena offset needed is the virtual address where that mapped file begins. This is one of the reasons, why for loading the Glibc profile, the linked list of vm_area_struct structs is needed (mentioned in Section III-B on page 26; the other reason is covered in Section III-C on page 27). The relevant task is now to go through the vm_area_struct structs, examine their file member and find the vm_area_struct struct for the beginning of the mapped Glibc library (typically the one with the lowest vm_start value). The last step is now to add the main_arena offset to the virtual address pointing to the beginning of the mapped Glibc library, and dereference the data at that address as a malloc_state instance.
If however the constant offset for main_arena is not available, the main arena cannot be directly determined and hence is searched via two different techniques. The first assumes that there is more than one thread and hence also more than one arena. As only the main arena struct is stored in the mapped Glibc library, all others are typically located at the beginning of a memory region, right after a heap_info struct (see also Section II-D1 on page 14). So, for each memory region described by a vm_area_struct struct (with some exceptions like mapped file regions or stack frames), the beginning of it is treated as a heap_info struct. If its ar_ptr field points right after itself and its prev field is null (the first heap_info struct points to no other heap_info instance and if it sits right before the arena, it is the first instance), the arena pointed to by ar_ptr is temporarily saved. If at the end at least one arena could be identified, it is tested whether or not following their next member ends up somewhere in the memory region of the mapped Glibc library. If that is the case, the address pointing in the Glibc is treated as the main arena.
If no further arenas could be identified (that means, there is only the main heap and potentially some MMAPPED chunks), the second technique is used. It leverages the fact that each bin chunk holds a circular doubly linked list. The idea is to follow the bk pointer of a bin chunk, until it leads to the main arena. To get such a bin chunk (there is yet no arena, whose bins could be used), every chunk on the main heap is examined for its PREV_INUSE bit (see also Section II-C2 on page 7). If this flag is unset in any chunk, the previous chunk is most probably a freed bin chunk. The previous chunk’s bk field is now followed, chunk after chunk, in order to eventually end up in the main arena. If at some point, the bk field points into the mapped Glibc library, the main arena is most probably found.
In this scenario, there is however still a problem. The bk field points to the middle of the arena (to a bin) and not to the beginning. While it would be possible to exactly determine the position within that main arena by examining the chunk’s size (each bin typically contains only chunks of a given size (range)) this approach is not always perfectly reliable because of varying bin sizes
(see Section II-C4 on page 11). The method used instead to get to the beginning of the main arena is a search for the top chunk pointer. There are two reasons to use this approach:
- The offset of the top chunk pointer in the malloc_state is fixed for a specific Glibc instance and hence reliable. So, if the virtual address of that field is found, the distance to the beginning of the arena can be easily calculated.
- There needs to be a reliable process to correlate an expected field with the current value. The top field serves such a correlation, as the chunk that it points to, should reach until the end of the memory region (the top chunk’s offset plus its size).
The process to get to the top field is now to walk backwards from the current bin, treat each pointer sized value as a pointer and check if it points inside the main heap and meets the requirements of the top chunk. The step size for walking back is equal to the pointer size for the current architecture, as between the top chunk and the bins are no other data types than pointers. As soon as the top field is found, the main arena’s address is calculated by subtracting the top field’s offset within the malloc_state struct from the found top field’s memory address.
As described in Section II-C4 on page 11, fastbin chunks do not use the bk pointer and are not linked in a circular list. Hence, even if they could be easily identified on the heap (which is not the case; see the explanation in Section III-B on page 26 regarding the dummy arena scenario), only with freed fastbin chunks there is no trivial way back to the corresponding malloc_state struct. This is why at this point (all other techniques failed), a dummy arena is used (see also Section III-E on the following page).
The dummy arena is a last resort kind of way to cope with the fact that there are no options left to get the main arena. The reason it is created anyways, is to be able to use all internal and public methods (see also Section III-A on page 25) normally, without having to change the internal logic. The dummy arena is in fact only an instance of the malloc_state class, whose fields have however no connections with any data of the process’ virtual address space. The connection to the heap is created with separate class attributes that are set during the initialization (see Section III-B on
page 26). For implementation specific information see also Section III-E.
No matter how the main arena is gathered, the sanity check regarding the arena count (described in Section III-B on page 26) is done afterwards (except for the dummy arena scenario).
E. The Dummy Arena
The dummy arena is necessary if the real main arena cannot be found, which has already been discussed in Section III-D on page 28. As also described in that section, the dummy arena is an instance of the malloc_state class that has no connection to the process’ virtual address space. That means, its members do not read any information from actual memory and hence must be set
manually. The separation from the process’ address space is also a protection mechanism, to prevent arbitrary data from being accidentally used for this instance or that setting some values might get written in the memory dump (if e.g. write support within Rekall is activated).
From an implementation point of view, the problem with this dummy object arises, when trying to access members that are pointers. To understand the problem, it is necessary to understand how using attributes of such objects works within Rekall. As those objects have typically an associated address space, the framework knows where to look for any data if a specific virtual address is given. This means, when using e.g. the top field of a malloc_state instance, which is a pointer to a malloc_chunk struct, the framework knows that this field points inside the process’ address space and hence tries to automatically dereference this struct right there. The result of accessing the malloc_state’s top member is normally an instance of the malloc_chunk class, which represents the malloc_chunk struct with the values from the actual top chunk.
With the dummy arena, this context is however not existent. While it would be theoretically possible to set the top field to the address of the top chunk within the process’ address space, using the actual top chunk via this field would not work, as the framework tries to access this address without the correct address space (leading normally to a malloc_chunk instance with zero values for all fields). To efficiently circumvent this problem, the attribute top chunk has been added to the malloc_state class, which not holds an address but an already instantiated malloc_chunk object for the actual top chunk and with correct address space. As the address spaces of the malloc_state object does not have to correlate with any objects contained in additional attributes, they can exist side by side.
The top_chunk attribute is the only additional attribute in the context of the dummy arena. While it would be necessary to do it for all pointer fields, the rest are not needed in the dummy arena scenario. There are no further identified arenas (hence the next field is not required), it was not possible to find any small or large bin chunks and fastbin chunks cannot easily be detected
by solely looking at chunks in memory (see also Sections III-B and III-D). The only task left for the dummy arena is to set the system_mem member. As this is a not a pointer but a simple numeric field, it can be set without having to worry about address spaces.
F. MMAPPED Regions
While the identification of memory areas belonging to an arena is in most scenarios pretty reliable (see Section III-B on page 26 and Section III-D on page 28), identifying regions containing MMAPPED chunks is not.
The reasons are:
- There is a lack of distinctive structs or reliable pointers to them.
- Any unnamed mapped memory region might contain MMAPPED chunks and they can be located anywhere in the process space.
It seems like pointers to those chunks are at most saved in stack frames of functions working with them, but not in any book keeping struct. So one way to identify them could be to interpret all pointer-sized bytes from all stack segments (from all threads) as pointers, follow them and verify the information residing at that position. This approach has however two problems:
1) It is pretty error prone (interpreting arbitrary data as pointers) and, depending on the stack size, pretty time consuming (each pointer must be read, followed, the data it points to initiated as a chunk object and its values tested).
2) It might miss some MMAPPED chunks. In the case, where an MMAPPED chunk pointer is not used anymore, its value might get overwritten by newer stack frames, but if the chunk has never been freed, it still exists in the memory space, serving potentially valuable information.
Because of the lack of alternatives, the current approach to decide, whether or not a certain memory region contains MMAPPED chunks, is to perform a plausibility check. Because a memory region containing solely MMAPPED chunks (differing examples are described later in this section) also begins with an MMAPPED chunk, the first bytes are treated as such, and tested for the following characteristics:
- The prev size field must have a value of zero.
- The chunk’s size (the value of the size field without any flags) must be at least as large as the page size.
- The chunk’s size must be evenly divisible by the page size.
- The chunk’s offset plus its size must not exceed the boundary of the containing memory region.
- The location of the chunk must be evenly divisible by the page size (primarily useful for subsequent and hidden MMAPPED chunks).
- The PREV INUSE and NON MAIN AREA bits must be unset and the IS MMAPPED bit set.
Only if all of those properties are given, the corresponding memory region is considered to contain MMAPPED chunks. Those checks are also done on any subsequent data of the same memory region, before they get included as chunks.
While MMAPPED chunks are normally within an exclusive mapped memory region, it can happen that those chunks are placed at the bottom of a mapped memory region, containing also different data such as stack segments (see Figure 16). As starting the search for MMAPPED chunks (in the stack scenario) at the beginning of the memory region might lead to false positives (interpreting stack data as chunks), a certain method is used, which is called EBP unrolling within this work. The basic approach is to follow all saved EBP pointers, starting with the base pointer gathered from the pt_regs struct (used to save register values on context changes). As each EBP value points to the next saved EBP, just following those pointers leads to the first saved EBP, probably located near the beginning of the stack segment. This process is also illustrated in Figure 16.
Once the offset of the first saved EBP is identified, the next step is to search backwards, from this point on, for the first MMAPPED chunk. As MMAPPED chunks are only located at addresses evenly divisible by 4096 (minimum page size), only such addresses are examined. In cases where the EBP value does not point to a saved EBP in the stack segment (because it is e.g. used for
carrying different data) the method stays basically the same, except it does no EBP unrolling and starts at the beginning of the memory region with the backwards search.
In cases where the missing MMAPPED chunks are not located after stack segments but hide somewhere else, the search scope must be extended while increasing the risk of false positives. The only regions that can be excluded are the stack and heap segments that have been already examined and those holding the content of mapped files (the vm_area_struct struct references a file object), as they could not be identified to ever contain other data (which would also be very unexpected, as those regions represent the file’s content). The search process for this case stays the same, but without the EBP unrolling. After the first hit within a memory region (no matter if after a stack or somewhere else), this first MMAPPED chunk is being used to walk the potentially following chunks.
If after the search process the values still do not correspond, but some new MMAPPED have been identified, there is no simple way of verifying the validity of those chunks (they could be arbitrary data mistakenly interpreted as MMAPPED chunks). This is why an additional verification step is performed that gives the investigator an indication whether or not the newly identified MMAPPED chunks seem to be valid. As mentioned in the beginning, pointer to MMAPPED chunks are at most saved in stack frames, which is why all stack segments are now searched for pointers to those chunks. When at least one pointer to a potential MMAPPED chunk can be identified, this fact is treated as a good indicator for this chunk’s validity. Because pointer used in user space processes point not to the beginning of a chunk but to the beginning of the data part (see also Section II-D3 on page 17), this needs to be taken into account (the appropriate offset must be added to the pointer, before starting to search).
The logging mechanism offered by Rekall is used to inform the investigator about the whole process described in this section. This includes the initialization of the search, the result of the stack pointer search and whether or not the identified MMAPPED chunks correspond at the end with the information from the malloc_par struct. The output about the stack pointer search reports for how many of the new MMAPPED chunks a pointer on the stack has been found. Listing 17 shows an example of this verification step while using the heapinfo plugin on a process with hidden MMAPPED chunks. Because all MMAPPED chunks could be found (and hence the final values correspond with the mp_values), no stack pointer search is performed.
In order to prevent false positives, the HeapAnalysis class starts a search for hidden MMAPPED chunks only if the current information about MMAPPED chunks seem to be incorrect (will be explained in the following Section).
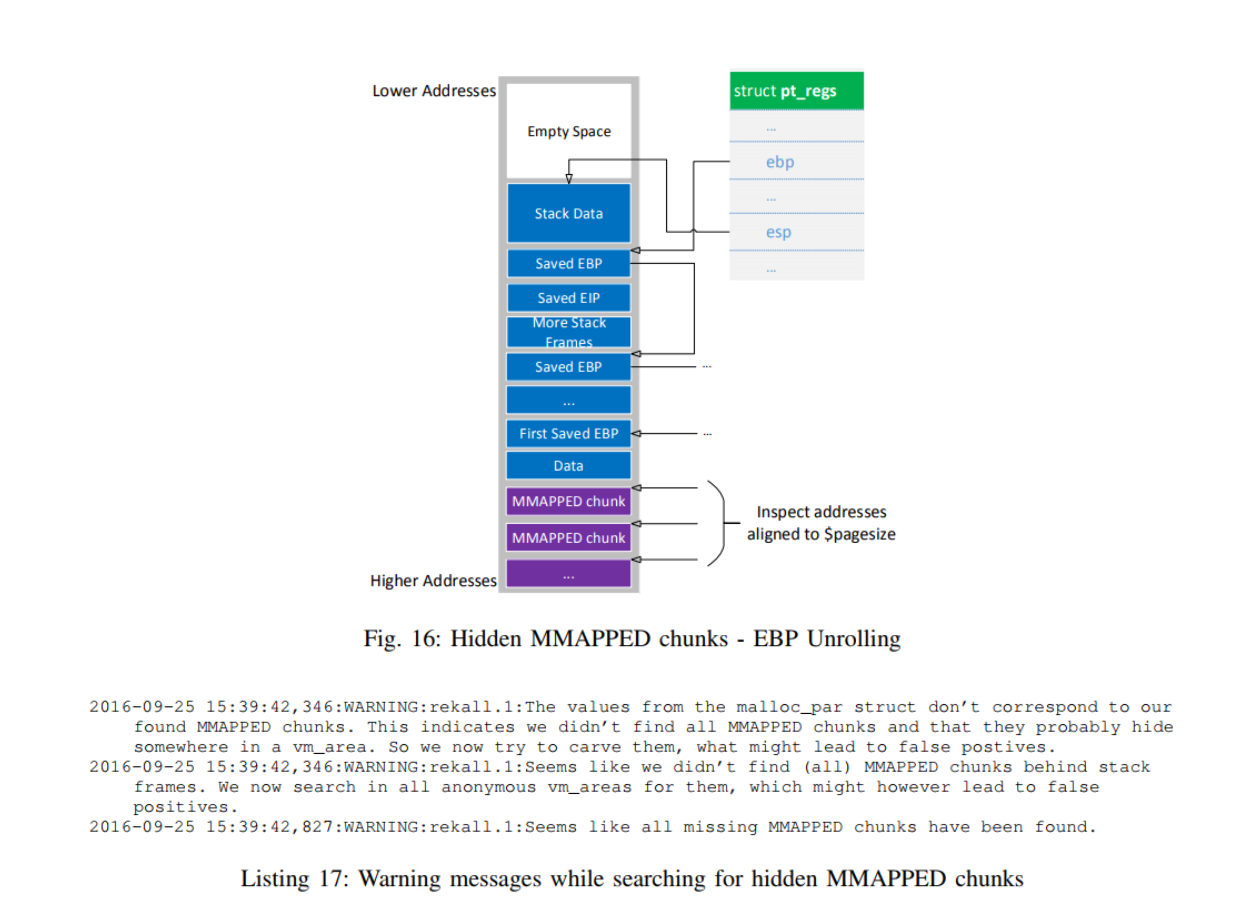
G. The Heap Analysis Plugins
The four main heap analysis plugins are:
heapinfo Provides an abstract overview over the number of arenas, chunks and their sizes.
heapdump Dumps all allocated and freed chunks to disk in separate files for further analysis.
heapsearch Searches all chunks for the given string, regex or pointer(s).
heaprefs Examines the data part of the given chunk(s) for any references to other chunks.
They will be demonstrated in Section V.
1) The heapinfo Plugin: An example output for the heapinfo plugin can be seen in Listing 18. The first line shows the command line call to execute the plugin, followed by the plugin’s analysis result. The plugin output has been split up into two parts to make it more readable.
The command line arguments are as follows:
mem.dump The ram dump from the Arch instance.
arch.json The Linux profile generated for the Arch instance.
heapinfo The plugin name to be executed with the Rekall framework.
arch-libc 2.23.json The Glibc profile, containing debug information like struct definitions in Vtype and constant offsets.
8703 The process ID to be analyzed.
For each analyzed process, exactly one line of output is generated. The following list explains all columns of that output.
PID The PID of the analyzed process.
Arenas The amount of discovered malloc state instances.
Heap I. The amount of discovered heap info instances.
Non MMAPPED chunks The amount of all main and thread heap chunks, excluding MMAPPED chunks.
N.M. chunks size The summarized size of all main and thread heap chunks (excluding MMAPPED chunks), taken from their size member.
MMAPPED chunks The amount of all MMAPPED chunks.
MMAPPED size The size of all MMAPPED chunks, taken from their size member.
Freed chunks The amount of all freed bin and fastbin chunks, not including top chunks.
Freed size The size of all freed bin and fastbin chunks (not including top chunks), taken from their size member.
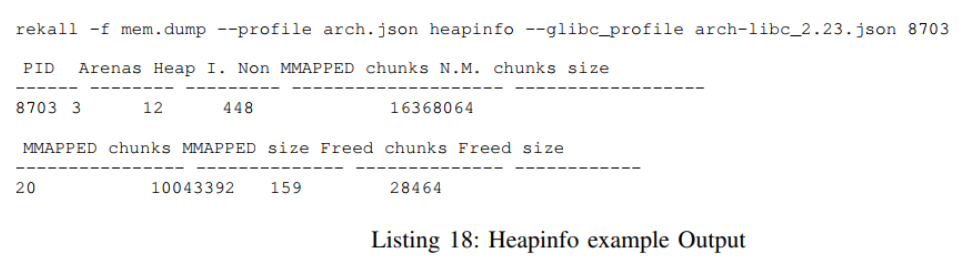
Besides the standard output, this plugin is capable of printing further details like struct information. This is accomplished by command line options, that can be specified by the investigator. The following list shows these options:
print_objects Prints each arena struct (malloc_state) and its top chunk and for each thread arena the corresponding heap_info structs and their first chunk.
print_allocated, print_freed, print_mmapped These options print the malloc_chunk structs of the corresponding type (allocated: all allocated chunks including MMAPPED chunks, but makes them distinguishable with special markers; freed: bin and fastbin chunks, which are also marked; mmapped: only MMAPPED chunks).
print_mallinfo Prints the content of the mallinfo struct according to the description from Section IV-A on page 35 (useful for manual result verification).
There are also two command line options that are directly served by the HeapAnalysis class and hence available for every plugin using this class:
glibc_profile This option expects a file containing the Glibc debug information, that are loaded internally (see Section III-C on page 27).
prevent_chunk_preservation This option prevents internally any chunk preservation mechanism. It is useful in cases where a process has a huge amount of chunks and the memory resources of the analysis system are limited.
2) The heapdump Plugin: The heapdump plugin dumps all chunks in separate files using unique filenames. The relevant function to get a chunk’s data is to string, mentioned in Section III-A on page 25. As it uses the formulas discussed in the subsections of Section II-D on page 14, it e.g. omits the content of the fd and bk and the next chunk’s prev size field, when dumping a small bin chunk and additionally the fd nextsize and bk nextsize members for large bin chunks. The omitted data is indicated within the filename by CHUNKSIZE and DUMPEDSIZE. Some file name
examples can be seen in Listing 20. The format used is:
![]()
PID The PID of the process. It is useful when dumping multiple processes in the same directory.
CHUNK-TYPE Can be one of the following: allocatedmain, allocated-thread, allocated-mmapped, freed-bin, freed-fastbin, top and bottom.
OFFSET The address of the malloc_chunk struct within the virtual address space.
CHUNKSIZE The size taken from the chunk’s size member (no flag bits).
DUMPEDSIZE The amount of bytes that have been dumped into the file. This value can in some cases be zero (most often with bottom chunks, but also e.g. with a freed bin chunk with a size of 16; see Section II-D4 on page 18), but the file is created anyways to not hide the existence of that chunk from the investigator.
The only command line option this plugin introduces is dump_dir, which specifies the destination folder in which all chunks should be dumped.
3) The heapsearch Plugin: The heapsearch plugin helps the investigator in identifying a chunk of interest. This can e.g. be done by searching for a specific string or pointer, which is expected to be contained in a chunk. When a match is found, the according malloc_chunk struct is printed, including its virtual address (see Listing 21 for an example output).
pointers Prints chunks that contain exactly the given pointer(s). The pointer(s) can be given as (hexa)decimal numbers.
regex Searches all chunks with the given regex and prints all hits.
string Searches all chunks for the given string and prints all hits.
chunk_addresses Expects address(es) belonging to a chunk(s) of interest, and prints all chunks having a pointer somewhere into the data part of that chunk(s).
search_struct Includes the malloc struct fields in the search process, which means the size field for all chunks and prev size, fd, bk, fd nextsize and bk nextsize for bin chunks. This is normally not desired and hence deactivated by default.
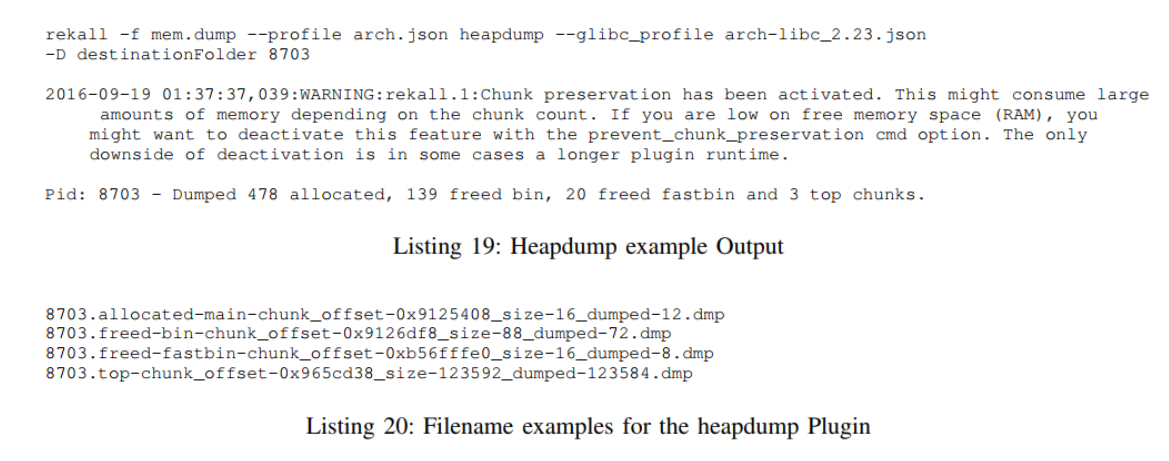
4) The heaprefs Plugin: The heaprefs plugin analyzes the data part of a chunk for pointer(s) to other chunks. If it finds one, it marks the data part containing the pointer and prints the address of the target chunk in the Comment column (see Listing 24 for an example output). The heaprefs plugin introduces only one option:
chunk_addresses The address(es) belonging to chunks of interest. Those chunks are then examined for references to other chunks.
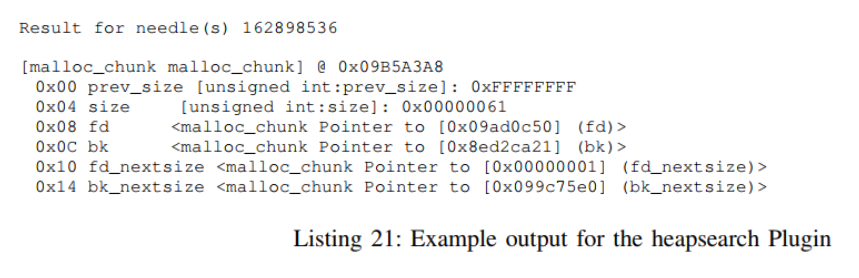
IV. Evaluation
This section describes the evaluation of the HeapAnalysis class and its plugins.
A. Result Verification
The verification of results is an important and elementary step in order to show the reliability of our methods and techniques. All tests have been conducted in the following environments while using different Glibc versions:
- Arch Linux 32 bit, x86, Kernel Version 4.4.5- ARCH, Glibc Versions: 2.20, 2.21, 2.22, 2.23 and 2.24
- Arch Linux 64 bit, x64, Kernel Version 4.4.5- ARCH, Glibc Versions: 2.20, 2.21, 2.22, 2.23 and 2.24
The HeapAnalysis class implements multiple functions, which compare the currently examined data with our expectations on every chunk while processing memory:
- Test for correct flags (e.g. NON_MAIN_ARENA for chunks in a thread arena).
- Is the chunk’s address aligned according to aligned_ok (see Section II-D2)?
- Size checks (see also Section II-C2):
– Is the size larger or equal to the MINSIZE?
– Does the size of the chunk exceed the boundaries of the current memory region?
– Is the size evenly divisible by MALLOC_ALIGNMENT? - Allocation status tests (for main and thread arena chunks): Is a presumably allocated chunk part of any bin or fastbin? Has a chunk following a freed bin chunk the PREV_INUSE flag set? . . .
- In the case of MMAPPED chunks there are some additional tests (see Section III-F for more details).
There are two further tests to mention, which are done while walking chunks in memory. As described in Section II-D2 on page 15, the first chunk must not necessarily follow directly the heap_info struct, but depending on the heap_info and also the malloc_state struct’s size, there can be a gap of some bytes (which consists solely of null bytes). The verification step in this case is, to predict the chunk’s size, examine the bytes after the heap_info struct and look for the first non-zero bytes which should be the first chunk’s size field. If that location does not meet the expectation, this indicates incorrect debug information and a warning is printed.
The second test verifies, that walking the chunks in memory leads to the expected end. This is in the case of the main arena and the last heap_info struct of a thread arena done by looking for the top chunk, whose size should point to the end of the current memory region. In the case of all other heap_info structs, the test searches for the bottom chunks (see Section II-E on page 20). If walking the chunks does not lead to the expected end (either top or bottom chunks), again a warning is printed.
Regarding MMAPPED chunks, there is another verification step which involves the global variable mp_ (an instance of the malloc_par struct; see also Section II-C1). While it does not offer any details about main or thread arenas and their chunks, its fields n_mmaps and mmapped_mem hold the number and size of all MMAPPED chunks, respectively. If the offset for mp_ is provided, the HeapAnalysis class uses the struct to verify the number and size of all identified MMAPPED chunks. If there are any discrepancies, it tries to identify hidden MMAPPED chunks and if that does not resolve the issue, it prints a warning (see Section III-F).
Regarding size comparisons, there are two further verification steps. The first one compares the size of all identified chunks (arena related but also MMAPPED chunks) and the corresponding heap_info and malloc_state structs with the size of their memory regions (described by vm_area_struct structs), while taking slack space for the heap and MMAPPED regions into account
(see Section II-D1 and Section II-D3). The second one compares the system_mem values of the identified arenas with their related memory regions.On any deviation, a warning is printed.
The last two checks that should be mentioned, try to verify the amount of identified arenas (malloc_state structs) and heap_info structs. As described in Section II-C1 on page 5, the maximum number of arenas is either determined by the one CPU core scenario (3 on a 32 bit and 9 on a 64 bit architectures), defined by the macro NARENAS_FROM_NCORES or manually set via mallopt (the malloc_par struct’s arena_max field). The arena verification functionality first tries to determine which one of the three is relevant and afterwards compares that value with the number of identified arenas. The workflow is as follows:
- First, the availability of mp_ is tested. If that fails, it aborts, as without access to the arena_max field, no reliable statement about the correct number of arenas can be made.
- The next step is to test the arena_max value. If this field has not been set manually, it typically has a value of zero.
- If it is not zero, this value is used for verification.
- Otherwise, the number of CPU cores is gathered from the plugin cpuinfo, offered by Rekall.
- If it is more than one, the maximum number is the result from the NARENAS_FROM_NCORES macro, if not, it is NARENAS_FROM_NCORES + 1.
- The last step is to compare the maximum number with the actual number of identified arenas. If it is higher than the maximum, a warning is printed.
As it was not possible to identify a maximum value for heap_info structs, the verification in this case is different. The goal is to verify, whether or not some heap_info structs have been mistakenly not found (e.g. from an unidentified arena), while assuming that all relevant arenas have been already identified. The general approach is to investigate all anonymous mappings except for the one containing the main heap, interpret the beginning of that region as a heap_info struct, gather all potentially following heap_info struct and examine their ar_ptr field. If the field of one of those potential heap_info structs points to a known arena, it is treated as a valid instance. If one of those valid heap_info structs is not in the list of already known heap info instances, a warning is printed.
B. Completeness
While the results in this work do not cover 100% of Glibc’s heap implementation, various steps have been performed to identify all relevant information and scenarios, relevant for the memory forensics perspective.
- Various tests with self-written programs.
– Varying order of allocations (e.g. at first MMAPPED chunks, then main arena chunks; has led to the hidden MMAPPED chunks scenario).
– Allocation of thousands of chunks in all arenas (led to the main heap distributed over two vm_area_struct structs and to multiple heap_info structs within one memory region; see e.g. Section II-D1).
– All special cases we are aware of.
– . . . - Source code analysis and verification with proof of concept code.
- HeapAnalysis’s internal verifications, that revealed e.g. the bottom chunk scenario (the test for hitting the bottom of a memory region, described in Section IV-A on the previous page).
- The evaluation done in Section V, which showed for the given applications that it was possible to completely gather the information in question from the heap.
- Tests on varying operating systems, architectures and Glibc versions (see also Section III-G on page 32).
- Performing a heap analysis on every applicable process (all processes except kernel threads) in the environments described in Section III-G on page 32, while performing the verifications described in Section IV-A on the previous page.
V. Application to Real-World Scenarios
This section illustrates the application of our plugins on real world examples. This is on the one hand done by describing the analysis process itself and on the other hand by highlighting the advantage of using our plugins instead of a raw search through the entire heap. The analysis performed in the following subsections was done using a black box approach, which means that,
if not specified otherwise, no process related details from the source code, like e.g. struct definitions, were necessary to be gathered beforehand.
A. zsh
The previously described bash plugin of Rekall and Volatility searches the whole heap space for timestamp strings that are prefixed with a hashtag, and afterwards searches it again for a history struct that points to the timestamp, in order to identify the issued command strings. The output of the plugin is a list of command entries, each consisting of the issued command and the corresponding timestamp. Our goal is to identify the same information for the zsh. The corresponding analysis in this section has been done in the same environments listed in Section IV-A.
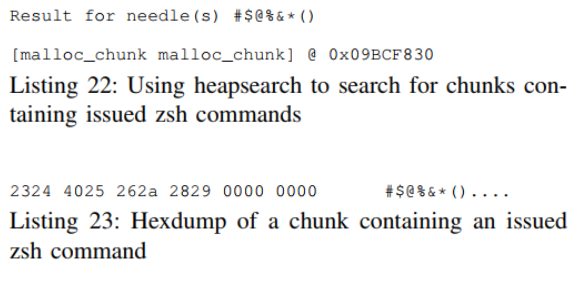
The zsh process to analyze contained 142 executed commands in its history (when examining the history with the history command); the first one was ps aux and the last one #$@%&*(). The first part of the analysis process has been done in a black box approach, meaning no internal information about how zsh stores commands or time information have been gathered in any way beforehand. The only knowledge basis for this approach was the information already available regarding the bash command analysis. The first attempt was to find timestamp strings that are prefixed with a hashtag. Zsh does not however seem to store timestamps in the same way as bash. The next step was to search for issued commands somewhere in chunks using the heapsearch
plugin. Listing 22 shows a result excerpt for searching the string #$@%&*() with heapsearch, revealing a chunk at address 0x09BCF830 which contains the command of interest.
While commands could sometimes be identified in more than one chunk, each command seemed to be at least in one allocated chunk that only holds the command and some trailing bytes at the end. Listing 23 shows a hexdump of a chunk containing an issued zsh command.
As those chunks did not offer any meta information (e.g. at which time the command was issued), the next step was to find pointers to those chunks by again using the heapsearch plugin, but this time providing the address of the chunk that contains the issued command. It was possible to find exactly one pointer for each tested command in a separate allocated chunk with a size of 56 byte (for the x86 environment).
After examining multiple of those chunks (using the dumped content from the heapdump plugin), the following information could be derived:
- Bytes 5-8 contain a pointer to the issued command.
- Bytes 25-32 are 2 timestamps, stored as four byte integers. The first four byte are the start time at which the command has been issued and the last four bytes are the time when the command ended.
- Bytes 41-44 contain the command counter.
When now examining those chunks for references using the heaprefs plugin (see Listing 24; the output has been stripped and modified for this work), it shows that bytes 1-4, 5-8 (the command pointer), 13-16, 17-20 and 33-36 point to other chunks. The start addresses of those chunks are listed in the Comment column, while the bytes containing the pointers are marked with square
brackets in the Data column.
By combining those insights with zsh’s source code, the relevant history entry struct histent reveals two of those pointers: the fields down (bytes 17-20) and up (bytes 13-16). Those fields are used to reference the previous/next histent entry and hence allow a reliable traversal of histent instances. As the linked list of histent entries is circular, just walking one direction is sufficient to get all histent entries. The other pointers are not important for the current examination.
The last task at this point was to build a plugin, that automatically extracts those command information. To be able to traverse the histent list, the first step is to reliably identify one histent entry. As commands can be contained in chunks of various sizes and do not offer any searchable pattern, the approach is to find chunks containing the histent struct. The containing chunk’s size is 56 byte for x86 and 96 byte for x64 architectures (the size results from the struct’s size plus the bytes required to get an aligned chunk size; see Section II-C2). Because there are also non relevant chunks with the same size, they need to be distinguished. As each histent entry should have a pointer to a chunk containing the command and a pointer to the next and previous histent entry, the test consists of checking whether or not those pointers reference an already known chunk. If the test result is positive, the last check is to walk the up and down pointers to the next and previous histent struct and test if their down/up member points to the current chunk. If this is the case too, the current chunk is treated as a histent struct and the command history is walked using the down member.
Listing 25 shows an example output of the zsh plugin (the output has been stripped).
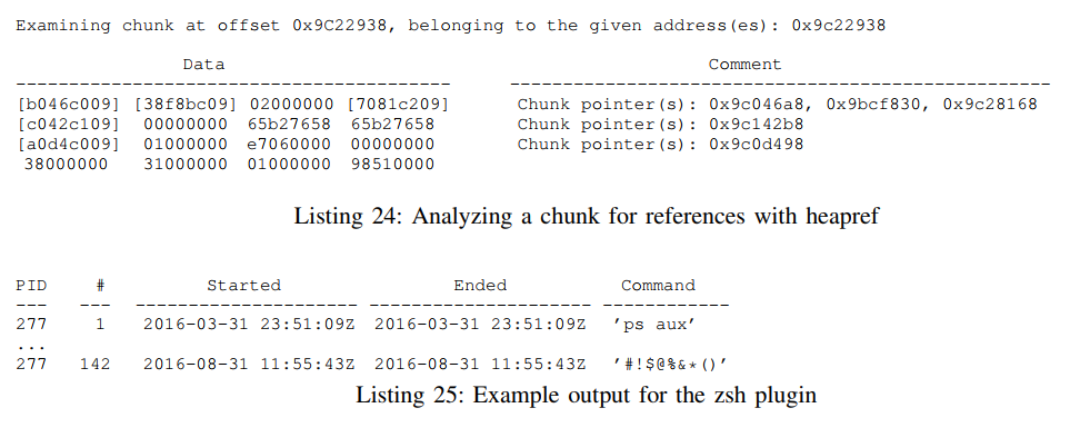
While it was possible to reconstruct the bash history with a raw search (because of the timestamp string), this approach would not have worked for the zsh, as the timestamp is not saved as a string with an additional hashtag but only as a four byte integer. Because, in addition, no further searchable patterns could be identified during the analysis, a raw search is most probably not applicable in this context and hence shows the advantage of using the heap analysis plugins.
B. KeePassX
The second tool examined was the password manager KeePassX (version 0.4.3) and has been tested in the following environments:
- Ubuntu 15.10 32 bit, x86, Kernel Version 4.2.0-16- generic, Glibc Version 2.21
- Ubuntu 15.10 64 bit, x64, Kernel Version 4.2.0-16- generic, Glibc Version 2.21
The setup for the following analysis consisted of a KeePassX database, which contained several password entries that have been separated in two folders. Each password entry had a value for Title, Username, URL and Comment. When the database has been opened for analysis purposes, only the first folder was opened while leaving the second folder completely untouched.
Our first attempt was to find the unencrypted master password and the passwords of entries somewhere in the process space, but they could not be found. The unhidden password for a currently open password entry however, has been successfully observed in three allocated chunks during 5 tests with different password manager entries. The three chunks persist as long as the password entry shows the unhidden password. If the password is hidden again, two of the three chunks are freed but one stays allocated. Only if the entry window is closed, all chunks containing the password are freed. Depending on the size of the freed chunk, the password is overwritten within milliseconds up to a few minutes or even hours by a new allocation. While freed chunks, containing passwords of a length range from 1 to at least 40, are normally reallocated within a few seconds or minutes, there have been instances where a freed chunk containing a password of that size has been consolidated in a bigger freed chunk. As some bigger chunk sizes are not allocated that often (e.g. in the range of a few hundred bytes), the password might remain for probably
a few hours in this chunk, but is also harder to find (it is surrounded by other data). Furthermore, the actual password has never been observed in the first 18 bytes of the chunks data part (see also the following analysis), which means that even in a case where the freed chunk is placed in a large bin, the password is not overwritten by any bin pointers on an x86 architecture.
After the password field, the next step was to look for further fields of interest. The fields selected for this analysis were Title, Username, URL and Comment. KeePassX stores the full field content in allocated chunks right after the database has been opened. This is not only true for fields like the title, URL and comment, but also the username field, which in the case of KeePassX is shown
only in asterisks in the overview and hence should not be needed unencrypted within the heap at that moment. To sum up: If a password database is opened and not locked, all fields from the overview (except the password field) from all password manager entries in all folders can be extracted from the heap. In order to analyze and compare the data from different chunks (containing the field strings), the heapdump plugin has been used to dump them in separate files. The following Listing 26 shows the hex dump output of a dumped chunk, containing a username (in this case yyyyyyyy_user5_AAAAAAAAB).
After comparing various chunks containing strings from the same type (such as usernames) and strings from other types, the following properties can be derived (which are also true for the unhidden password):
- The string is always 16-bit little endian encoded.
- The string does not start at the beginning of the chunk’s data part, but exactly after byte 18. Most probably because the string is part of a struct/object.
- Bytes 5-8 and 9-12, respectively, correlate with the string’s size, while bytes 9-12 state the correct size (the size is the number of characters represented by the encoded byte sequence, not the number of bytes). Both are probably instances of a four byte unsigned integer. The value from bytes 4-8 has been exactly by one larger than the value from bytes 9-12 (see also Listing 26: 0x19 vs. 0x18).
- Bytes 13-16 point to the beginning of the string.
- The string is followed by 4 null bytes.
- Depending on the size of the string, there were additional bytes at the end (kind of padding bytes), ranging in the most cases from zero till 6 byte. There have been however seldom cases, in which this number went up to 14 bytes (6 plus the amount of bytes until the next higher chunk size).
Bytes 1-4 did not change and while bytes 13-18 and the bytes after the string at the end changed a lot, they did not show any reliable coherence to a certain type or password manager entry.
The next step was to search for any pointers to a field string using the heapsearch plugin. While a search for the string’s start address did not reveal any references (except for the one contained in the same chunk), searching for the beginning of the data part of that chunk revealed at least one pointer in another chunk. When analyzing this chunk with the heaprefs plugin, it reveals 12 pointers to other chunks. Following those pointers shows that four of them point to the chunks containing the Title, Username, URL and Comment strings. After analyzing more password entries, it was possible to make the fair assumption that for each password entry, there is a chunk of size 96 byte (in the x86 environment) that references at least those four fields. That means, by searching for chunks of the same size and examining the pointers at the given offsets, it is possible to gather the Title, Username, URL and Comment string of the same password entry. This information was used to create a proof of concept plugin by using the HeapAnalysis class, which automatically extracts these four fields for all password entries. Listing 27 shows an example output of that plugin (the output has been stripped, especially regarding the strings to fit in one line).
It should be mentioned that without the information about the start address from the chunk context, finding references to the field strings would have been more difficult, while in the worst case preventing the possibility to correlate the various strings to one password entry.
C. Wget
The tests in this section have been done in the following environments:
- Arch Linux 32 bit, Kernel Version 4.4.5-ARCH, Glibc Version 2.23, Wget Version 1.17.1
- Arch Linux 32 bit, Kernel Version 4.4.5-ARCH, Glibc Version 2.23, Wget Version 1.18.1
- Arch Linux 64 bit, Kernel Version 4.4.5-ARCH, Glibc Version 2.23, Wget Version 1.17.1
- Ubuntu 15.10 32 bit, Kernel Version 4.2.0-16- generic, Glibc Version 2.21, Wget Version 1.16.1
Wget is a utility to download resources from a specified URL. It can be used for that purpose by simply calling it with an URL, which will immediately result in an attempt to download the desired resource and store it in a local file for further usage. As online resources can be protected by authentication mechanisms, it offers options to provide e.g. username and password information. The
fact that it exists on nearly every Linux instance makes it interesting for attackers who have compromised a Linux system and e.g. want to download additional malware for their attack.
In the case of an incident, where attackers downloaded certain files from external resources using Wget and erased those traces afterwards from the file system, an investigator might want try to download those resources for analysis purposes. If the URLs are known, but the access is protected by authentication, the need for credentials arises. When the HTTP Basic Authentication (Franks, 1999) is used, extracting those information is fairly easy. It can e.g. be established by simply searching over the whole memory dump for the command line call which immediately reveals the username and password as shown in Listing 28.
Even when the password is not given on the command line, it can simply be decoded from the Base64 encoded authentication string contained within the HTTP Authorization header (Franks, 1999). Listing 29 shows an example extraction.
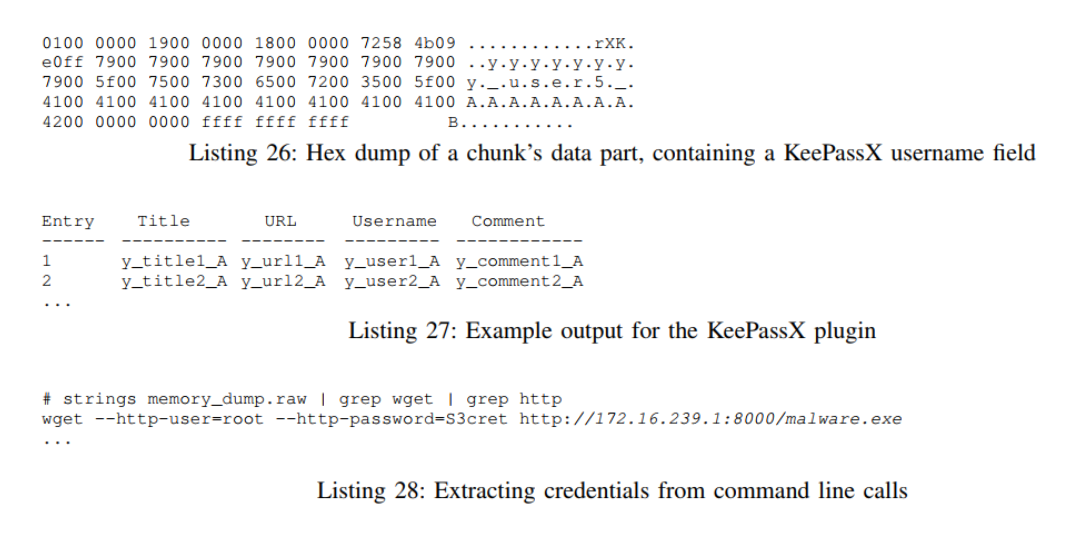
If however, an authentication mechanism like HTTP Digest authentication (Franks, 1999) is used, and the password is not provided on the command line, the necessary password might still be in the memory dump but cannot simply be spotted. A replay attack, using the HTTP Authorization header retrieved from the memory dump does not normally work either, as the server sends
on each authentication request a new nonce, which is incorporated in the digest generation and hence leads each time to different authentication material. It is however possible to reliably retrieve the password from a certain allocated chunk within the heap.
While the amount of allocated chunks ranges from about 86 for Wget versions 1.16.1 and 1.17.1 up to 2445 for version 1.18.1, the amount of chunks for the relevant sizes containing the password ranges only from one up to four. As in all 21 test runs (using the same or differing passwords), all non-relevant chunks of the same size contained only scattered printable characters (see Listing 30 for an example), it should be most of the time pretty easy to find the correct one.
The password was, in all 21 test runs located at the beginning of the chunk’s data part, followed by some null bytes and arbitrary further content (in some cases only null bytes, in other cases strings). An example output can be seen in Listing 31. The password in this case is asdfghjklZXasdfghjklZX.
The relevant chunk sizes differ mainly in relation to the password length. The following list summarizes the results.
- In all tested environments with a password length smaller or equal to 118, the relevant chunk size was 128.
- In all tested environments except for the 64 bit Arch Linux with a password length greater than 118, the relevant chunk size was 248.
- In the 64 bit Arch Linux environment with a password length greater than 118, the relevant chunk size was 256.
As can be seen in Listing 31, there is no leading pattern before the password, which would be easily recognizable in a memory dump while performing a raw search (without the chunk details). Also the content after the password within the same chunk does not offer a reliable search pattern, as this content changed multiple times. A reliable raw memory search would hence only be possible, if the string to search (in this case the password) would be known up front. As this is a rather theoretical scenario, this analysis shows the advantage of using the introduced plugins. Instead of relying on a searchable pattern or the content of the data, it is possible to identify the password by simply focusing on a chunk size.
It should be noted that Wget processes normally only live for a few seconds and their data might in most cases already be overwritten by other processes. But if the process data is still available or the Wget call e.g. did not reach the endpoint yet and hence is still running (the timeouts last in many cases quite long), the password might be extractable.
D. Building a Plugin
This section shows how a new plugin can be created using the HeapAnalysis class (see Section III-G on page 32). The current example creates a plugin to extract field information for password entries within the password manager tool KeePassX version 0.4.3, based on the results from Section V-B on page 38. These fields include the title, username, URL and comment string and are arranged according to the password entry they belong to. It should be noted, that this plugin has only been tested in the environment described in Section V-B on page 38.
The plugin works in essence as follows. It retrieves all allocated chunks and searches for the ones containing the references to field strings. If it finds one, it gathers thosefield strings and prints them. The following explanations refer to Listing 32 and describe the plugin in more detail.
Lines 2 and 4 The new plugin imports the heap analysis module and extends the HeapAnalysis class.
Line 9 The name of the new plugin, which is necessary to be able to call it from the command line.
Line 11 The framework’s function to render the output, which is the starting point of this plugin.
Lines 12 and 13 For each given task, the HeapAnalysis instance is initialized.
Lines 15, 17 and 20 This dictionary is filled with all allocated chunks, which can be accessed by their data offset. This eases the access to chunks containing field strings later on.
Line 19 As the field strings are contained in allocated chunks, this plugin searches only in those chunks (including main arena, thread arena and MMAPPED chunks), by using the public function
get_all_allocated_chunks from the HeapAnalysis class.
Lines 23 – 27 Defines the columns of this plugin’s output.
Line 29 The offset where the extractable strings start, within the chunk’s data part (see also Section V-B on page 38).
Line 30, 54 and 55 Responsible for printing each password entry.
Lines 32, 35 and 36 The first step is to find the chunks containing pointers to the field strings. Those chunks have typically a size of 96 byte.
Line 38 Retrieves the data part of the current chunk.
Line 40 and 52 Holds the title, username, URL and comment string for the current password entry, by using the Python method repr. The advantage of using repr is that no data is hidden from the user’s eyes (if e.g. null bytes are at the beginning of the string, they would normally not be recognizable).
Line 34, 42, 43, 45, 56 and 57 Each chunk with a size of 96 byte is examined for potential chunk pointers at the offsets mentioned in Section V-B on page 38. If there is a chunk for each pointer, this the current chunk is considered as a password entry. If one of the pointers does not belong to a known chunk, the next chunk with a size of 96 byte is examined.
Line 47 and 48 Calculates the size of the current field’s string.
Line 50 and 51 The currend field string is extracted and decoded.
Listing 33 shows its ouput, which has been stripped to fit in one line (marked with three dots before and after a string). Entry 16 shows a complete output, but also an entry that is not a password entry created for the test scenario. The same goes with the entries 8, 9 and 11. These have also been observed after creating a new database and adding only one entry. The assumption is that they serve internal purposes and are held in all KeePassX processes, while probably using the same or a similar struct as password entries (which is why they are appearing in the output).
The u in the beginning and the surrounding single quotes within Listing 33 are the result from using the repr function (as mentioned earlier) and are around every string (only in this case stripped for most of the strings). The advantage of using repr is that no data is hidden from the user’s eyes (if e.g. non-printable characters are part of the string), as can be seen in entry 16 for the URL string.
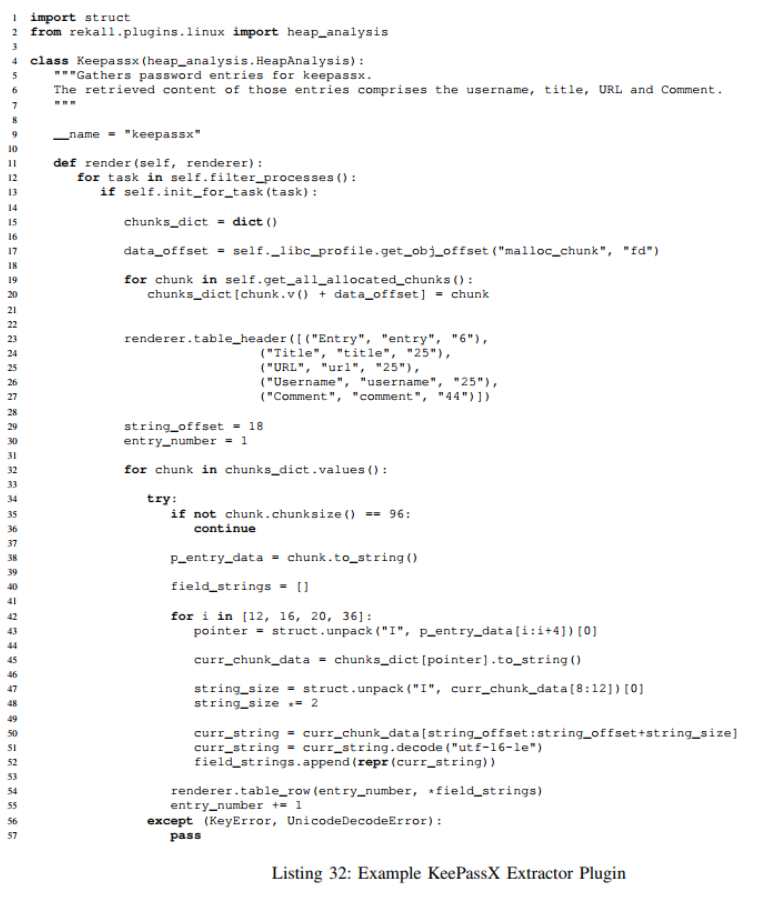
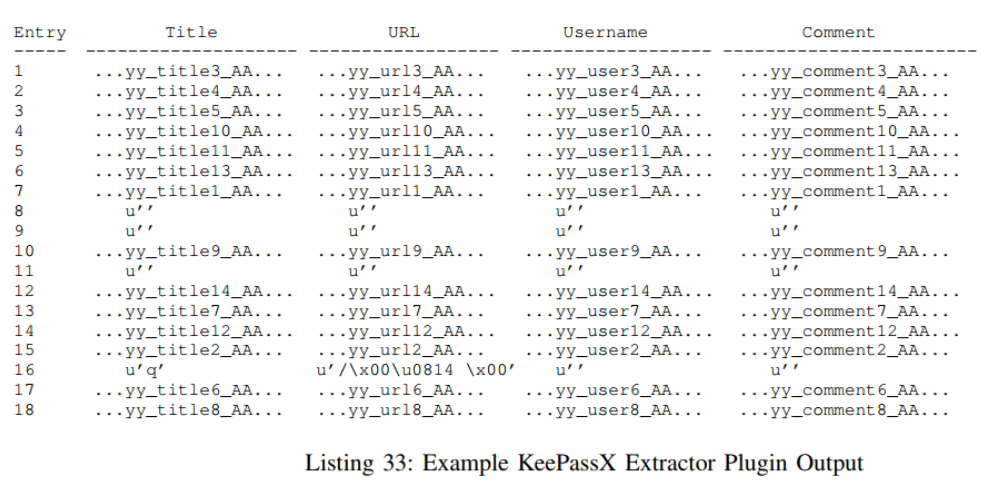
VI. Conclusion and Future Work
This section summarizes this work, highlights some limitations, gives a prospect on future work and concludes the results.
A. Summary
This paper focuses on analyzing the heap in the context of Linux processes with the research objective to support an investigator in analyzing data contained in user space processes. First, an in-depth understanding of Glibc’s heap implementation was established, which is documented in Section II. The analysis focused on how and where heap related data is stored from a memory forensics perspective. Second, this knowledge has been used to build plugins for the memory forensics framework Rekall (Google Inc, 2016c), which analyze the heap of a Linux user space process and offer access to the identified chunks. The implementation details are documented in Section III and describe in particular an algorithm to identify hidden MMAPPED chunks. As producing reliable results is a crucial requirement in computer forensics, Section IV covers information that enable the verification of the gathered results. To illustrate the usefulness of our implementation, Section V describes the black box analysis process of userspace applications, using the example of zsh and KeePassX.
B. Limitations
As already explained by Cohen (2015) for pagefiles, swap space is in some scenarios a crucial resource during the user space process analysis, which is not addressed in our work so far. When the plugins introduced in this work are used on a process with swapped out pages, containing heap related data, they will most probably fail in reliably analyzing the heap and extracting all chunks.
One of the goals of this work was to serve a processlike view on data contained in the memory. While this has been accomplished to the maximum extent of details that the heap is offering in this context (the location of a specific information and its size), it was not possible to extract information about the type of data. The reason is that the heap does not store any data type information.
One way to still correlate a certain chunk with a specific type exists in a scenario where the data type and the size of the data itself is known up front. By searching for chunks of that size, the investigator might be able to gather data of a specific type. This approach requires however further tests on those chunks (as shown in Section V-A), as there might be more chunks with the same size containing different data.
As stated in Section II-A, the usage of a certain heap implementation is not bound to a specific operating system. In cases where a different heap implementation is used, the findings and plugins from this work will most probably not be applicable, but instead need to be performed analogue for those implementations.
To this date, our HeapAnalysis class and the plugins only support the analysis of Linux processes on the mentioned architectures and Glibc versions. The information provided in this work and the technical report can however be used to add support for further architectures or operating systems.
While it is possible to analyze the heap of a user space process without supplying debug information, it is not reliable in all cases. Beside the fact that the plugins will most certainly fail in analyzing the heap when any of the relevant structs has changed (malloc_chunk, malloc_state or heap_info), the results might still be incomplete if the pointer to the global variable mp_ is missing. Without mp_ it is not possible to reliably determine if all MMAPPED chunks have been discovered and as the search for hidden MMAPPED chunks is not initiated in this case, there might be at least one MMAPPED chunk missing in the output.
Besides hidden MMAPPED chunks, there is one further scenario, in which the HeapAnalysis class might miss chunks: If the analysis process mistakenly left out a vm_area_struct containing a whole arena, the results seem still to be correct but miss the arena’s chunks. This case might happen in a scenario, where no debug information for the main arena’s location have been provided and the main arena search process is not able to find it, which also means that this process was unable to find any thread arena. As no valid pointer to any arena is available in that scenario, there might be an undetected arena and hence unnoticed chunks. While this case is theoretically possible, the implemented functionality to detect such scenarios did not miss any arena during our evaluation.
C. Future Work
The limitation considered most important is the missing support for swap space. In order to fully analyze the heap of a process, the access to all pages containing heap related data must be ensured. The acquisition and integration of swap space into the memory forensics process is hence considered a fundamental step for further user space process analysis.
To increase the support of the HeapAnalysis class, the plugins could be tested on further architectures and adjusted appropriately if required. An analysis of further heap implementations such as jemalloc would in addition, allow to analyze the heap allocations of processes from applications such as Firefox. Furthermore, when conducting an appropriate analysis in the context of FreeBSD processes, it would also include another operating system.
D. Conclusion
The plugins introduced in this paper simplify the analysis process and enable the identification of information in memory that cannot easily be found using a pattern matching approach. These plugins and the documented details about heap objects in memory can also be used to support further research in the field of memory forensics and help forensic investigators to clarify an incident or crime. Furthermore, this paper demonstrated the analysis of user space processes while illustrating the advantage of having heap details during the analysis process.
See PDF version for appendix.
References
Block, F., Dewald, A., 2017. Linux memory forensics: Dissecting the user space process heap. In: DFRWS USA.
Case, A., Marziale, L., Neckar, C., Richard, G. G., 2010. Treasure and tragedy in kmem cache mining for live
forensics investigation. Digital Investigation 7, S41–S47.
Cohen, M., 2015. Forensic analysis of windows user space applications through heap allocations. 3rd IEEE
International Workshop on Security and Forensics in Communication Systems 2015, 1138–1145 [Visited on 04.03.2016].
URL http://www.rekall-forensic.com/docs/References/Papers/p1138-cohen.pdf
Ferguson, J. N., 2007. Understanding the heap by breaking it. Black Hat USA [Visited on 22.03.2016].
URL http://www.blackhat.com/presentations/bh-usa-07/Ferguson/Whitepaper/bh-usa-07-ferguson-WP.pdf
Foundation, T. V., 2016. Volatility. [Visited on 04.03.2016].
URL http://www.volatilityfoundation.org
Franks, J., 1999. Rfc 2617 – http authentication. [Visited on 03.08.2016].
URL https://tools.ietf.org/html/rfc2617
Free Software Foundation Inc., 2016. Gnu c library (glibc). [Visited on 15.08.2016].
URL https://www.gnu.org/software/libc/
Ghemawat, S., Menage, P., 2015. Tcmalloc – claimed performance improvement over glibc. [Visited on 16.08.2016].
URL http://goog-perftools.sourceforge.net/doc/tcmalloc.html
Gloger, W., 2006. ptmalloc2. [Visited on 15.08.2016].
URL http://www.malloc.de/en/
Google Inc, 2016a. bash: Rekall plugin to extract the command history. [Visited on 04.03.2016].
URL http://www.rekall-forensic.com/docs/Manual/Plugins/Linux/#bash
Google Inc, 2016b. cmdscan: Rekall plugin to scan the bash process for history. [Visited on 04.03.2016].
URL http://www.rekall-forensic.com/docs/Manual/Plugins/Windows/#cmdscan
Google Inc, 2016c. Rekall memory forensic framework. [Visited on 04.03.2016].
URL http://www.rekall-forensic.com
Lea, D., 2006. dlmalloc. [Visited on 15.08.2016].
URL http://www.malloc.de/en/
Leppert, S., 2012. Android memory dump analysis. Master’s thesis, [Visited on 04.03.2016].
URL https://www1.informatik.uni-erlangen.de/filepool/thesis/android memory forensics.pdf
Ligh, M. H., Case, A., Levy, J., Walters, A., 2014. The art of memory forensics: detecting malware and threats in
windows, linux, and Mac memory. John Wiley & Sons.
Macht, H., 2013. Live memory forensics on android with volatility. Master’s thesis, [Visited on 04.03.2016].
URL https://www1.informatik.uni-erlangen.de/filepool/publications/Live Memory Forensics on Android with
Volatility.pdf
Urrea, J. M., 2006. An analysis of linux ram forensics. Master’s thesis, Monterey, California. Naval Postgraduate
School, [Visited on 04.03.2016].
URL http://calhoun.nps.edu/bitstream/handle/10945/2933/06Mar Urrea.pdf
Valasek, C., 2010. Understanding the low fragmentation heap. [Visited on 15.08.2016].
URL http://illmatics.com/Understanding the LFH.pdf
Wilson, P. R., Johnstone, M. S., Neely, M., Boles, D., 1995. Dynamic storage allocation: A survey and critical
review. In: Memory Management. Springer, pp. 1–116.
About the Authors
Frank Block and Andreas Dewald conducted the above research on behalf of ERNW Research. The paper was presented at DFRWS USA. Further information can be found in this blog post; the full paper including appendices can be downloaded as a PDF.